Hi Everyone.
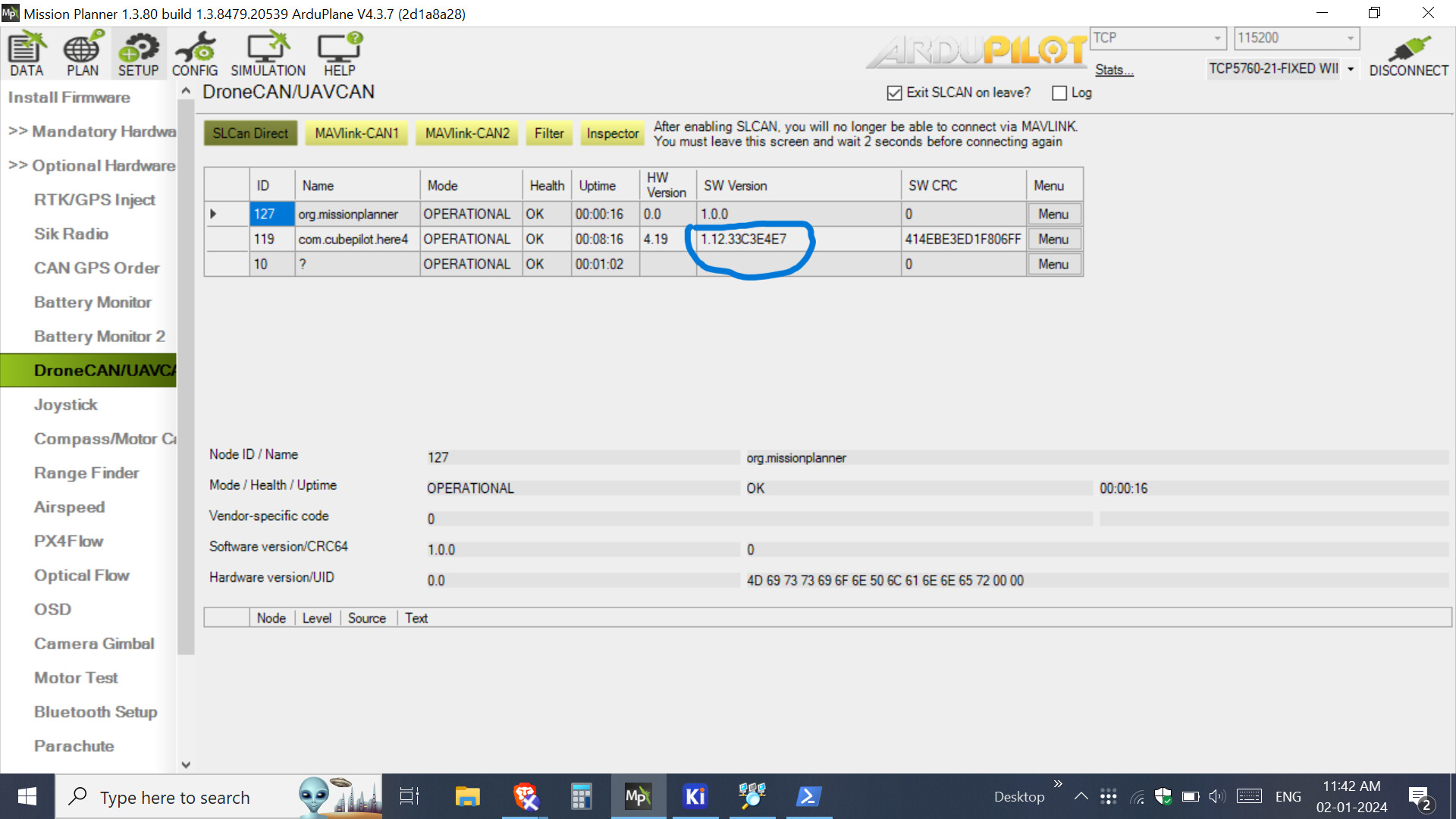
While trying to I update Here-4 GPS through Mission planner SLCAN there was a firmware change, but it downgraded the firmware from 1.3.3DA008BF to 1.12.33C3E4E7
Below are the screenshots from MP.
@sidbh Is there any way to set the FW back to 1.3 ?
Getting GPS failing config checks continually after the GPS 1& 2 is recognized (both here4)
both are running 1.12 version.
@Ashish_Abraham_Math please share the logs, also can you let me know if this is Here4 Black or Here4 Blue. You may need to do firmware update through this process Here 4 Manual - CubePilot . But do share logs, so I can confirm that is the issue.
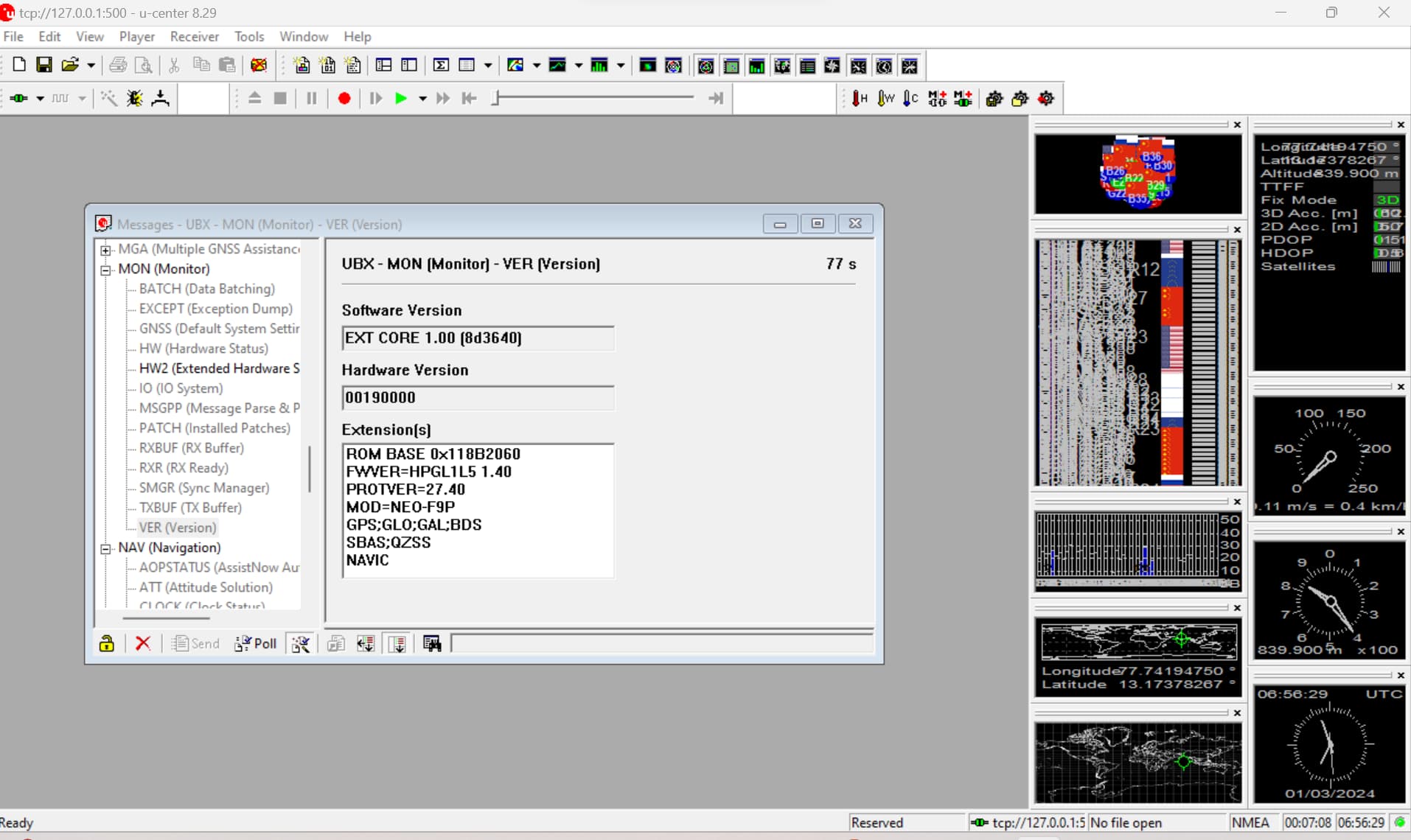
@sidbh We are using here-4 Black, we had done the Firmware update through Mission planner SLCAN, using the manual, are you recommending to do a Ublox update through U-center?
Will share the Logs in some time
Hi @sidbh we have attempted the ublox FW update, but it was already the updated FW in ublox.(UBX_F9_100_HPGL1L5_140_F9P) We nevertheless flashed it again with the FW from the here4- Docs. but this didnot solve the Config messages.
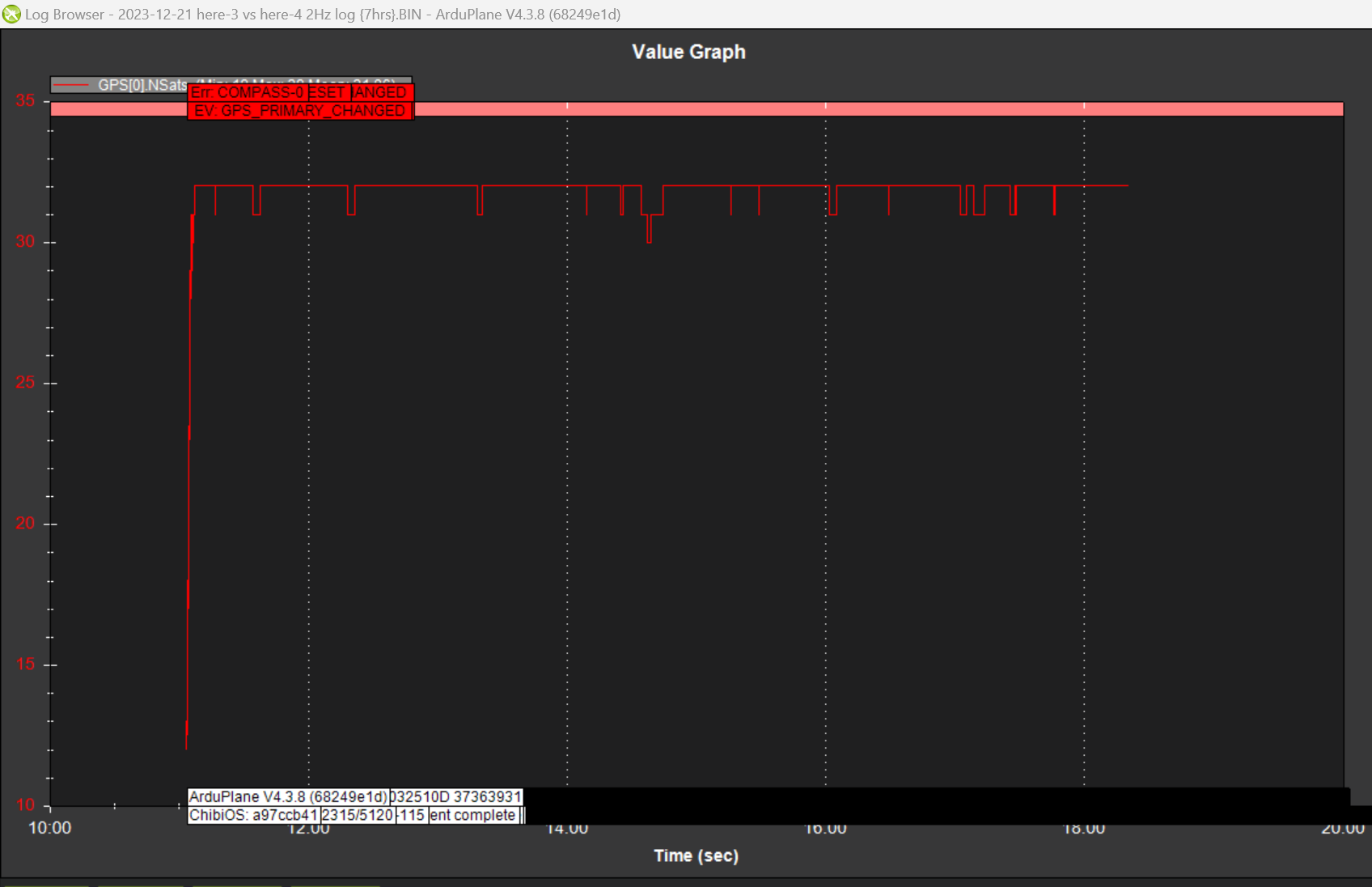
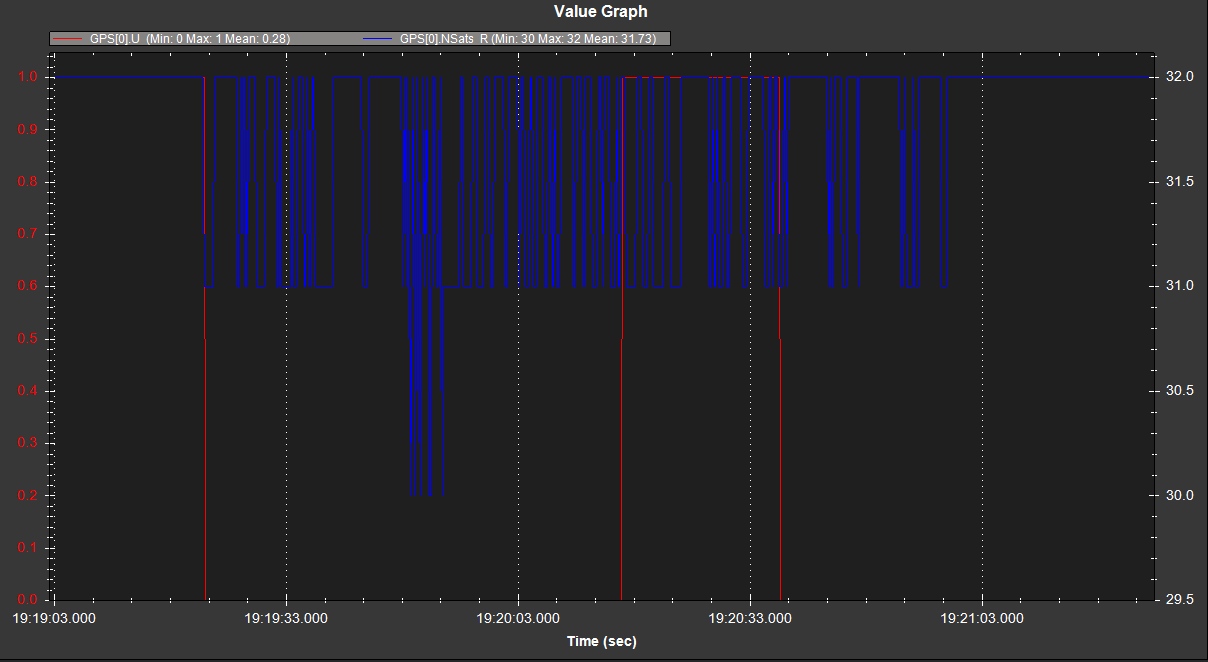
So, we downgraded the GPS FW from v1.12 to 1.11, this solved the issue of GPS failing config checks msg’s. But this introduced noise in the N.sats. and there is frequent satellite drop making the AP to switch primary GPS frequently. (much noisier than what we experienced with FW v1.3).
@sidbh So primary here-4 GPS is getting power through Cube, orange carrier board, Secondary is getting external 5v power.
Rangefinder, Telemetry radio & RaspberryPi, GPS-d2(also here-4), Airspeed sensor.
The above are all getting external power, only GPS-1 is powered via Carrier board.
Unlikely that you will have any difference between v1.11 and v1.10 they are exactly the same firmware with change to embedded CubeID firmware only, which is not relavent for you as CubeID is included only in Here4 Blue not Here4 Black. @Ashish_Abraham_Math
Also can you try latest v1.13 , the LEDs are reset before booting to main firmware.
Hi @sidbh, We are also facing Altitude error from the here-4 GPS,
Although the Take-off altitude & land Altitude are same, there is an error of 8-10m when landing.
Once it reaches the ground it is showing -10m, so the aircraft starts the final Descend at 20m as opposed to the desired 10m, this is increasing our landing battery consumption.
Range Finder only activates at 10m till then, the AP is relying on GPS.
I have attached the logs below.
This is one such Log, this is the most extreme case(-10m error), if you require more logs, let me know.