Hi,
as a guy coming from DJI stuff, I was really happy to see that there is some professional alternative to DJI Lightbridge and A3.
We already use the channel expansion kit on LB2 … The buttons and switches work, but the usability is a pain in the a**.
By switching to Pixhawk / Arducopter i promised myself to have less technical limitations, so I bought the Herelink and the Cube Orange.
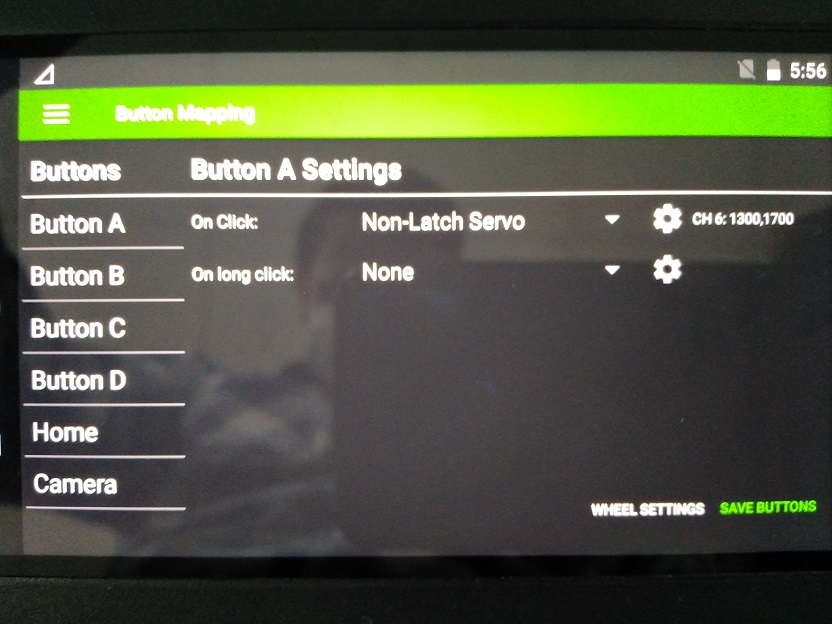
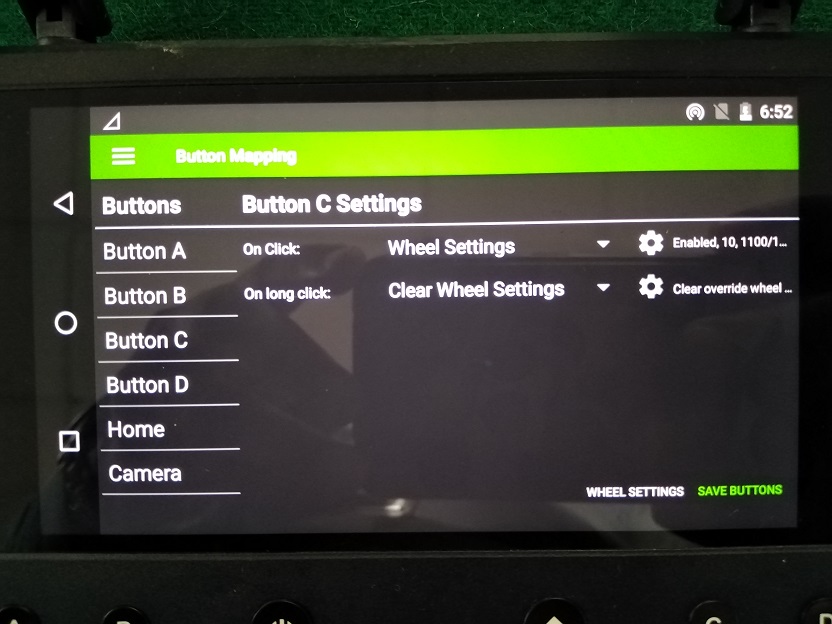
After the basic setup, I came to the button configuration …
I am using a Alexmos Gimbal Controller and a Sony RX 100 and a PWM to Multiport Adapter (GentWire)
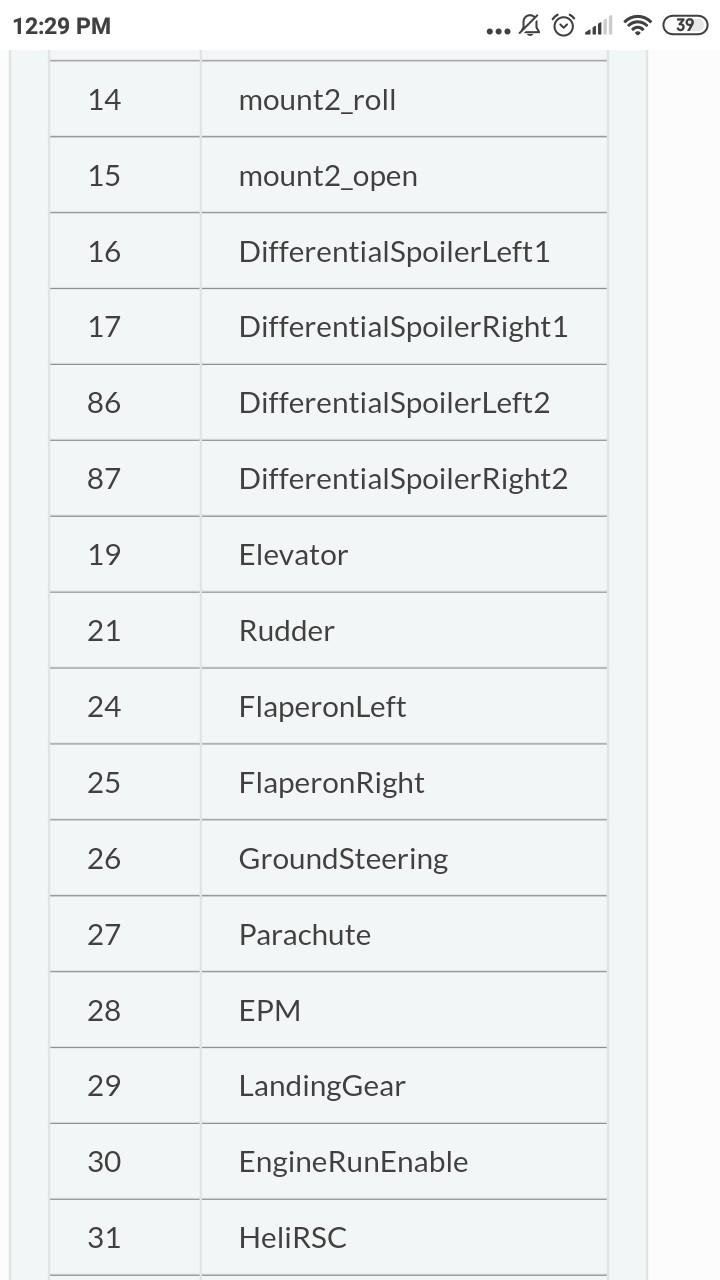
So I need one channel for zoom and one for video and image capture.
-
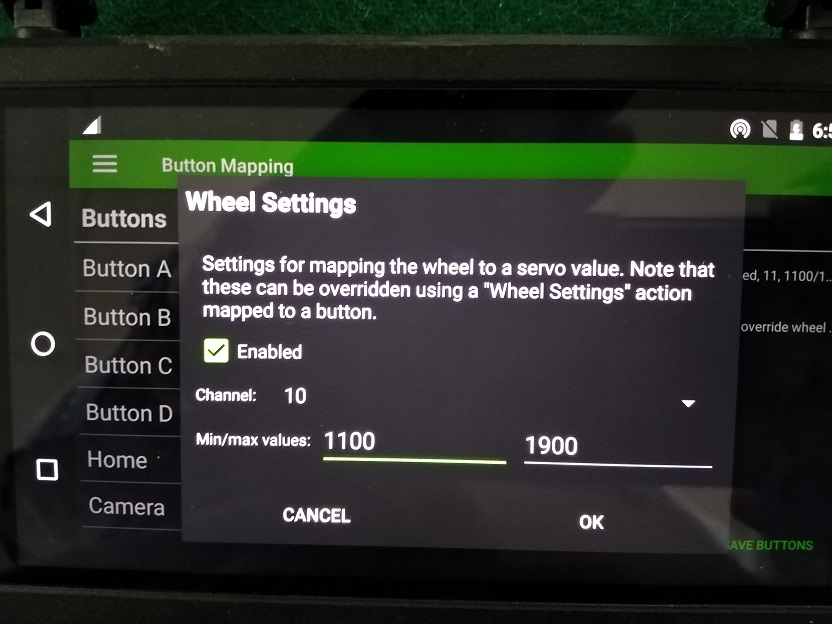
Tilt gimbal: At first, I set up the Dial to tilt my Gimbal. That worked fine.
-
Zoom: I would like to use a button combination (lets say “hold A button and move dial” to zoom in and out). hmm… no such options
Then as a workaround I wanted to use two buttons on the same rc channel to zoom in and out (hm, doesn’t work either, because I just want to give a very short impulse while pressing the buttons and I cant map 2 buttons to the same RC out). -
Taking Photo: I finally managed to use the upper right trigger button, to take a photo (but no such options such as “double click” to make the camera start recording …
-
Flight Mode Switch: And last but not least: how to switch flight modes, with just a single button?
Anybody here use Herelink commercially?
How did you guys work out these problems?
best regards,
Chris