I update my herelink, but I have a problem. it ask again the serial code and not start.
1 Like
you need to get that from your reseller
1 Like
QGroundControl need to be updated to detect “short” and “long” button press (as Solex already does) to have more options to configure flight modes
These are available in the Settings app
yeah, but settings in the app is the reccomended way as per documentation since “Mavlink provides a safe command link for mode change and is not affected by system reboots and loss of signal”. Also i read in the docs that changing flight mode in the OS settings could lead to “unpredictable behaviour”.
having long & short options for buttons is very handy also out of selecting flight modes but also for other things, in fact it “doubles” buttons options or long can be used to trigger a “dangerous” function in a “safer” mode, i.e. less likely to be triggered by mistake.
what I missing from the controller, is the ability to control the gimbal, along the flight.
the button are used in my drone for legs up/down/2 flight mode/light on/off/camera zoom in/out
if I have the option to control also the gimbal (2X3 way switch) like I use in my trains x9, it would be great.
the fact that the system is based on android, is great, I wrote an analytics program for the drone,
I made the drone recognize between human and animal, and track him (great for my dog to run away from the drone)
but still work in progress , it’s also recognize some human as animal (but I don’t know if it’s bug or not LOL)
Sounds very interesting! Would you be ready to report more about youre project?
The interesting question is, do you need to worry about the people who are recognized as animals or those who are not. Those humanoid non-animals might be individuals from the Galactic Federation.
@philip Sir, can I know the recent stable version released? And when can we expect the next stable release?
Also is there an official page or a website where we can check recent releases, just to stay updated?
Hi everyone,
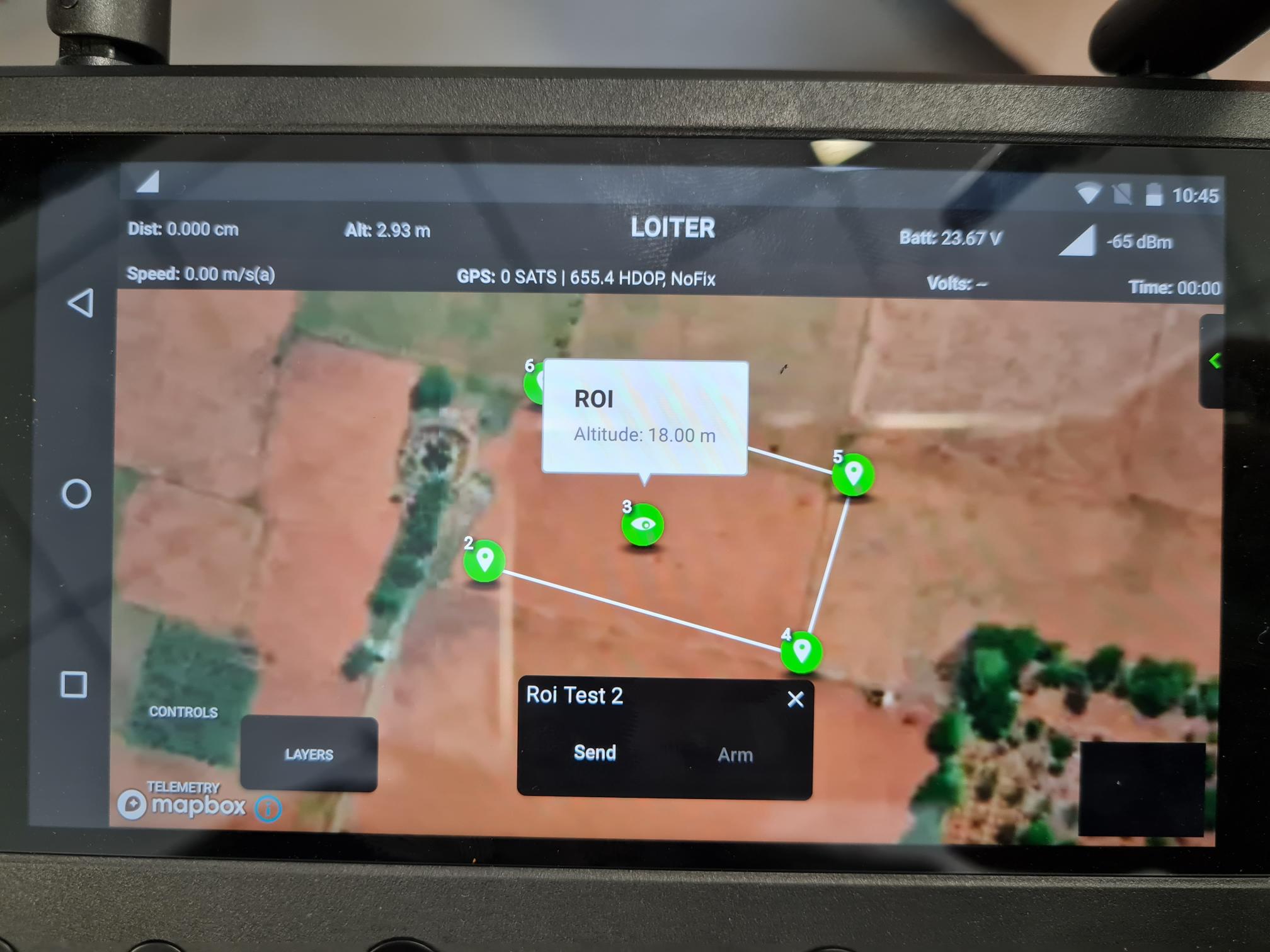
I believe there is one bug related to ROI. Please correct me if I’m wrong.
When I plan a ROI mission on the mission planner using DO_SET_ROI, It works well. I can observe the vehicle yawing and pointing the camera on the ROI throughout the mission.
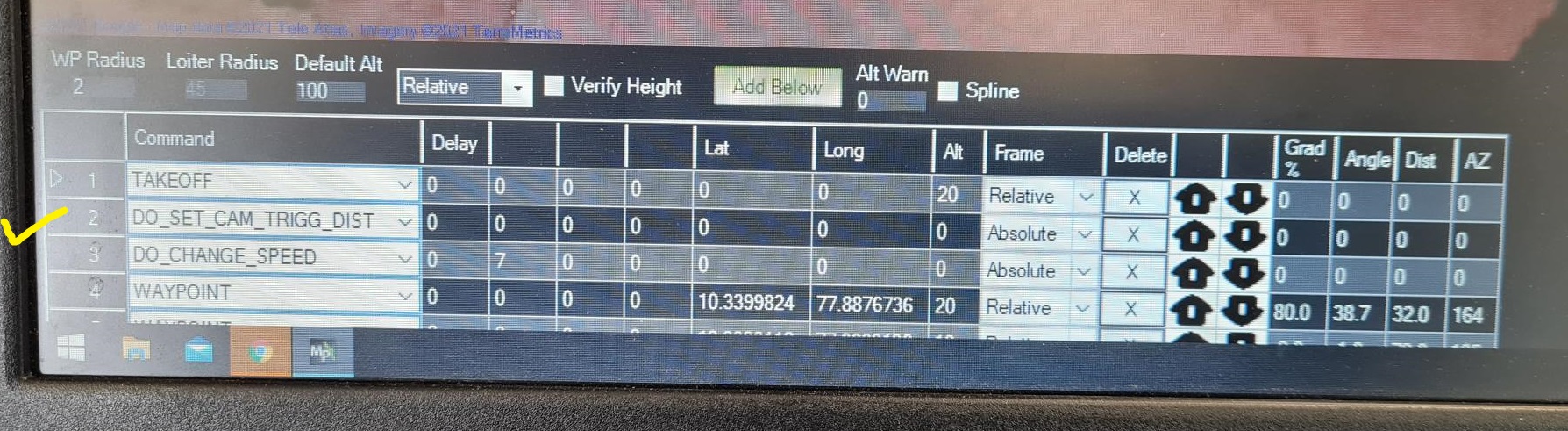
Although when I plan ROI mission via SOLEX on Herelink and read the plan in mission planner, the command seen is “DO_SET_CAM_TRIGG_DIST” instead of “DO_SET_ROI”.
Due to this the vehicle never yaws facing the ROI and the initial vehicle direction is constant throughout the mission.
@kellyschrock @philip
Hi Dhruva,
Can you share your mission file with me by any chance, or let me know exactly what I need to set up in Solex to reproduce this? I fly ROI missions very frequently, and haven’t noticed this behavior. I’d like to get it sorted out ASAP if it’s not working.
Thanks,
Kelly
Hi @kellyschrock
I really appreciate your fast response. I’m hoping we are able to figure out a solution soon. Or if I’m performing wrong, please correct me.
I’m uploading a sample test case here. I have inserted 5 waypoints including 1 ROI point via the SOLEX mission planner page.
It can be observed that point 3 is ROI set in solex. Although when I read the mission in the mission planner, it indicates DO_SET_CAM_TRIGG_DIST.

ROI test sample.zip (305 Bytes)
Orange Cube firmware: V4.0.5
Herekink: Latest Update.
Hi Dhruva,
I see the problem here. You’ve dropped a ROI point in the editor, but what you need to do then is tap on the waypoint where you want the ROI to become active. At the bottom of the detail panel that appears, select “ADD” under “Actions”. A list will appear. Click “Set ROI”, and a new action will appear. Tap “click to set” on the action, and pick the ROI point you added (it will have an auto-generated name by default, but you can change the ROI’s name in the detail panel for the ROI itself).
Select another waypoint where you want the ROI to become inactive, and perform the above steps on that waypoint. Select “reset” as the ROI, and the ROI will be cleared at that point in the mission. Alternatively, you can define multiple ROIs and switch from one ROI to the other this way.
The reason it’s structured like this is so you can define multiple ROIs in a mission and use them flexibly from any waypoint in the mission, turning them on and off whenever you like.
The DO_SET_CAM_TRIGG_DIST command you see in the mission is generated by default to ensure that no residual “Cam Trigger” commands are still active when a new mission starts.
Thanks,
Kelly
1 Like
Hi Kelly,
Thank you very much for the information. We tried the way you advised for multiple missions and it works very well.
Thanks again.
Regards
Dhruva
Hello all,
I have on the new stable firmware the issue i posted on another thread:
Hello @MadRC , i suppose the proposed setup was available only before the stable release?
i can see that on AAU01210729 you can no longer choose Sbus out on the wheel and also on solex i cant see to find a way to make your setup work, since it allows the wheel up to ch16 and sbus starts from 17. Am i doing something wrong? It seems also that the docs are also outdated and dont follow along with the latest fw changes
Does this answer your question?
1 Like
The wheel for some reason accepts only 5-16 channels and also i have not found a way to do what @MadRC had said in the past and be able to cingif a button with which i would be able to jump between two function on the wheel. Tilt and camera zoom.
Ok. That’s strange. I have the wheel on Channel 26 or so (which is SBUS2) and it works just fine.
So you really can not set the slider for the wheel channel to anything from channel 17 onwards?
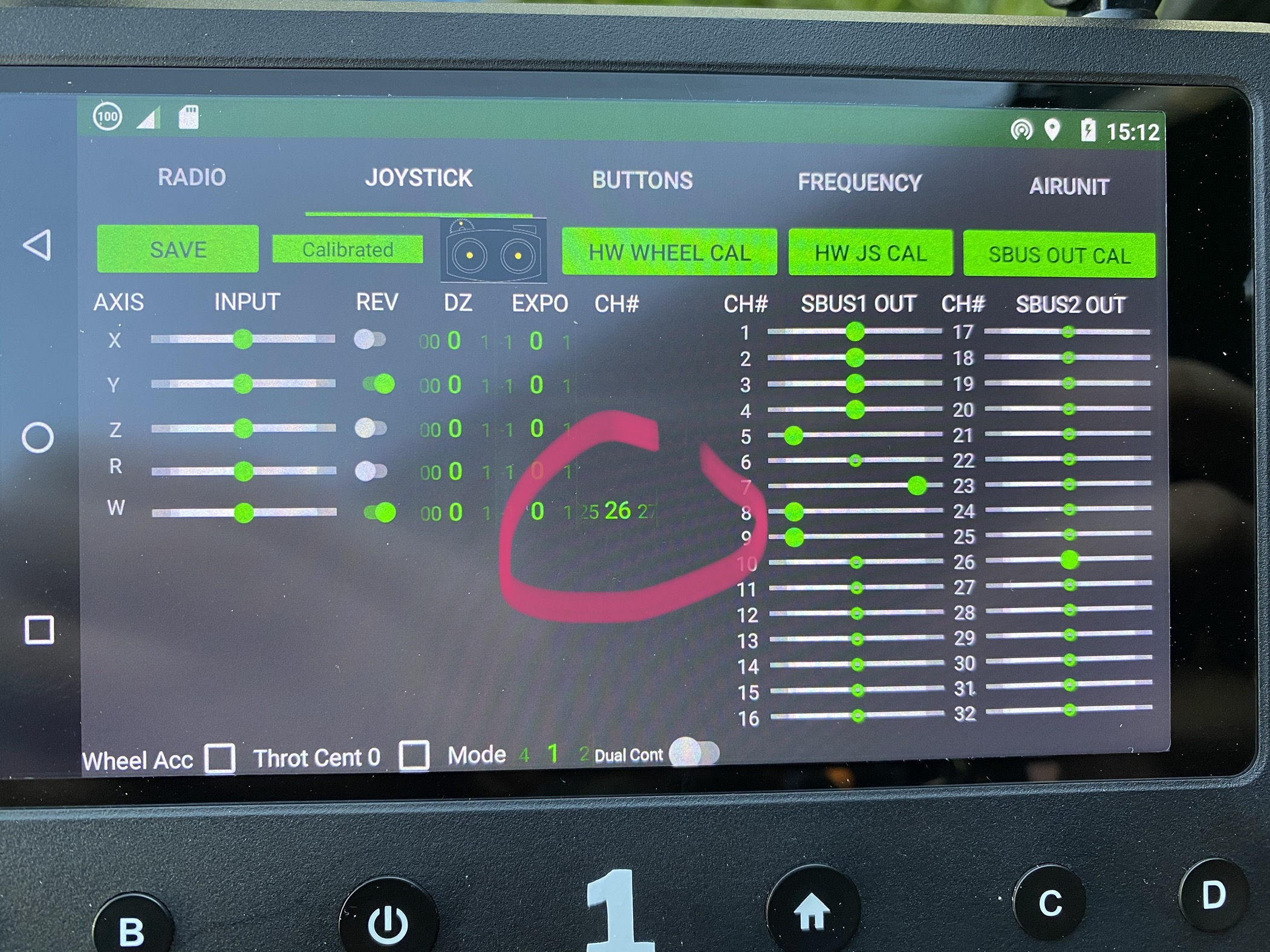
You can only set it from the herelink config. if you try from solex, it goes up to 16 and no more. which means you cant have a seperate fuction for it on solex., ill make a short video later today and post
Hello friend, today I decided to update the herelink, after opening the flasher_win.exe application on another pc that I could correctly open, I started with the update and everything started as usual correctly.
After the first bar of downloading the package in the executable flasher_win.exe the wiffi started to download from my computer, it was disconnected by mistake, after that my herelinlk restarted and when it turned on it never started it stays on the screen that I show in the video.
Try to do the update from 0 initial in 3 windows computers with usb debugging and everything is correct.
but now it is impossible to fix this problem as you can see in the video
It only works to update our herelink in this way or via SD is it possible? or some solution?