PauG
(Pau)
1
Hi everyone,
This is my first post as I recently purchased my Herelink station.
I’m trying ti use it in a boat with this setuo:
-Pixhawk Cube
-Herelink
Bluerobotics T-100 + Basic ESC’s
Main problem is that the trhusters doesn’t spin.
This is the parameter list extracted from Mission Planner
pauG.zip (4.1 KB)
Pixhawk firmware: Rover 3.5.1
Herelink has QGC development master 2019/04/26
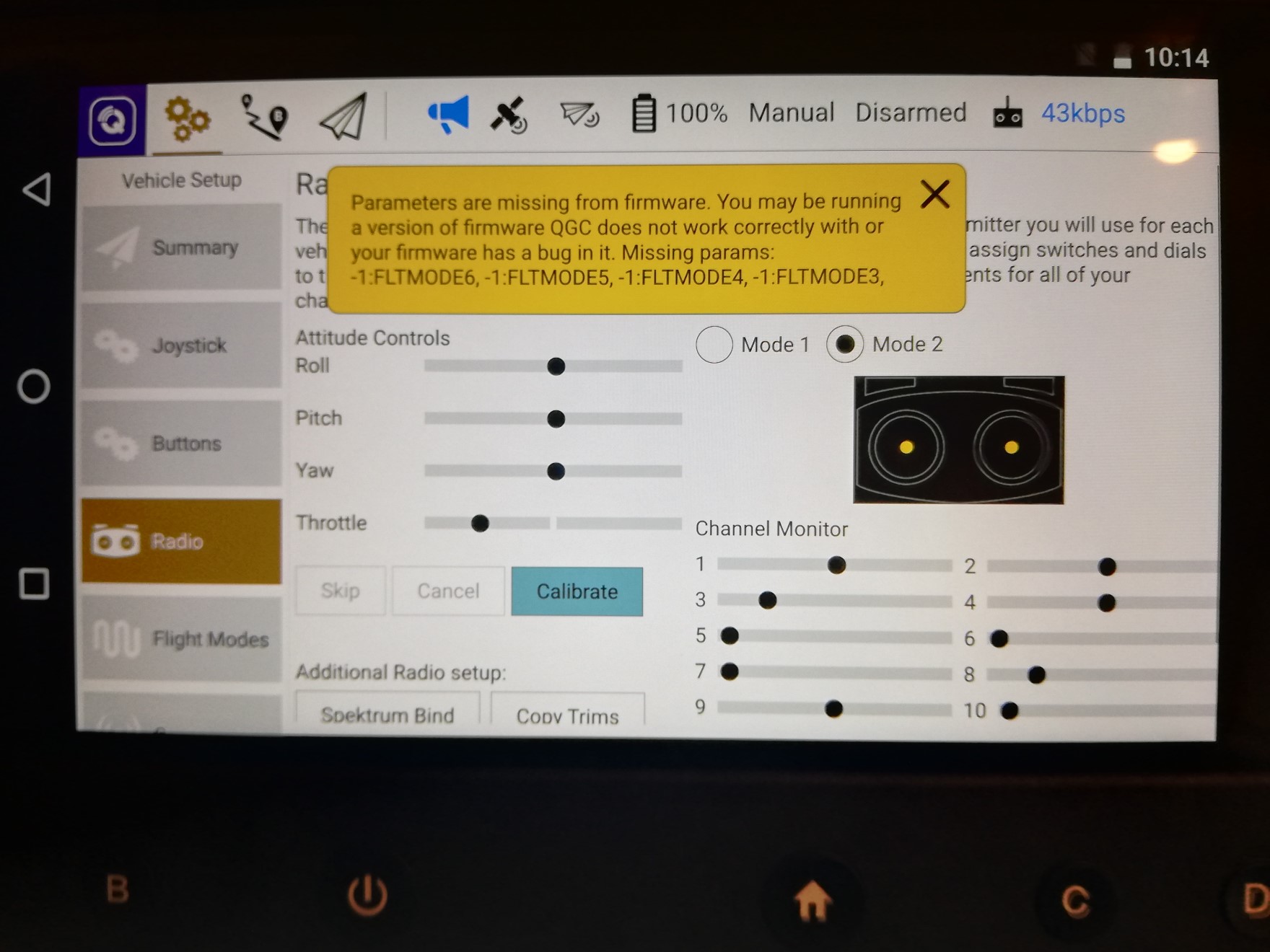
In the Radio menu, throttle keeps in that position. When I push forward in increases but when I press backward it also increases.
Channel monitor from 9 to 16 are blinking
There’s also a problem with the flight mode parameters as you can see on the pop-up message.
That’s all I noticed that could be irregular.
Thanks in advance.
I gave you my 2 cents worth over on the Ardupilot site.
philip
4
When posting here and at ardupilot, please post a link so the conversation can be followed rather than having two separate conversations
This is the link I think.
PauG
(Pau)
6
Hi,
Continuing with some issues trying to solve with no succes.
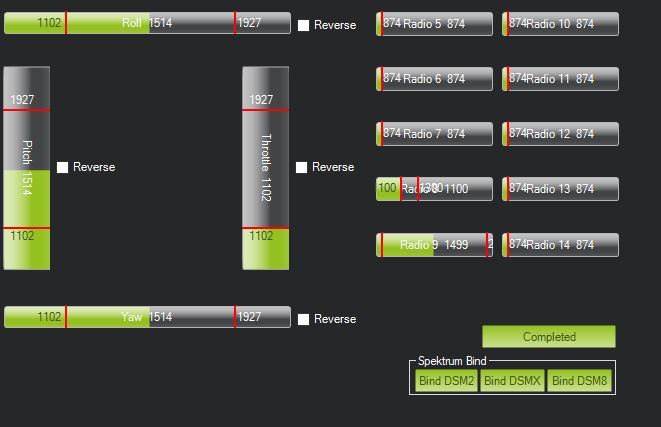
Throttle seems to be trimed at 1102 pwm. (lowest calibration point) that’s neutral point, thruster doesn’t spin, I can move forward but not backward.
Any Idea?
Thanks in advance
philip
7
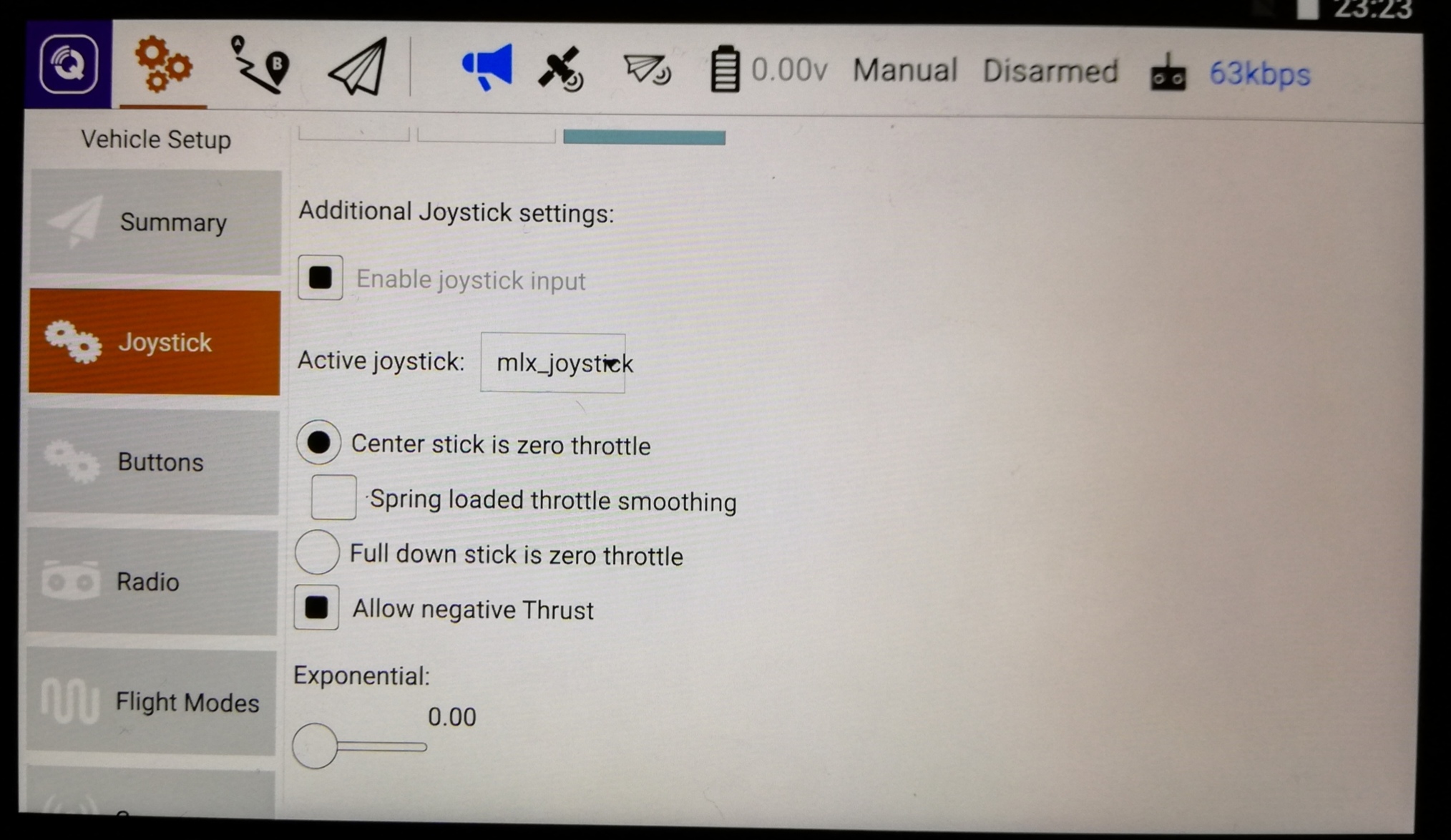
In QGC on HereLink, you can set the throttle type to having reverse
PauG
(Pau)
8
If you mean this option, is already enabled but it doesn’t work.
MadRC
(Ian )
9
Can you post a video of the throttle stick full movement
You may need to perform the hidden calibration for the hardware. It’s in the Cube pilot docs section. .
I had the same problem and I solved it this way
Hope this can help you