I tried calibrating at home in my house and thought i might be getting some interference from my house wiring or even my steel table, but I just tried going out to a nearby soccer field with nothing within >100’ and only saw negligible results.
I tried looking in the arducopter documentation, but I cant seem to determine which compass is #1, #2 and #3.
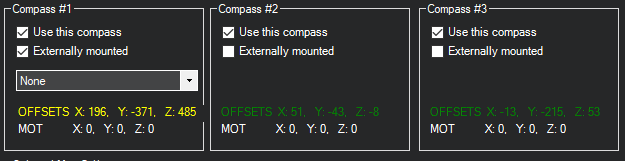
I am 90% positive that compass #1 is automatically the external compass; but I am wondering how the offsets could be be so much higher for an external compass than the other two (which I assume are internals) especially considering how high off the frame it is mounted.
Are these numbers typical? They seem high to me. Am I missing something? Do I need to make a grounded shield underneath my HERE2?
Cool; that’s reassuring. It definitely didn’t change an appreciable amount when I went out to the field, and that was a completely different macro environment. (outside; noting within >100ft; open sky above) same micro environment, though cause it was right down the street.
So I guess that shows some consistency in results…
Unfortunately, I haven’t flown yet due to really in-opportune timing between when I ordered my cube and the grounding SB.
I recently went out to a massive soccer field to try a Re-calibration. No flight yet, but I’ll be sure to check the mags in the logs once I feel comfortable to fly.
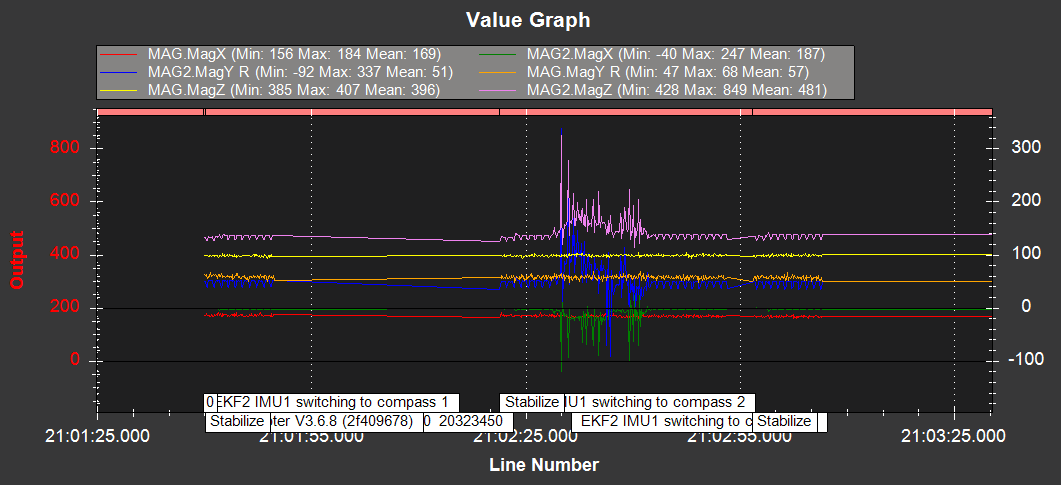
These still feel high - How are these offsets so high and inconsistent even when 6" above the frame? This was just a little no-takeoff flight on my deck to verify stick input directions, and Im seeing a variation of 400+
No, that is next. I’d also like to look into compass learn which is a new feature since I’ve gotten back into arducopter. (my last build was back in the apm days)
My intuition is just telling me these are high. Idk. Hopefully I’m wrong.
How is it possible that the two internal compasses which are significantly closer to not only the flight controller electrical noise, but also the power dust and escs, are that much lower in magnitude?
The Log auto analysis is also identifying my compass offsets as high and the compass test is a big fat FAIL:
Log File G:\2019-05-15 21-01-40.log
Size (kb) 3618.662109375
No of lines 42385
Duration 0:11:02
Vehicletype ArduCopter
Firmware Version V3.6.8
Firmware Hash 2f409678
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - FAIL: Large compass offset params (X:196.08, Y:-371.85, Z:485.55)
FAIL: Large compass offset in MAG data (X:196.00, Y:-371.00, Z:485.00)
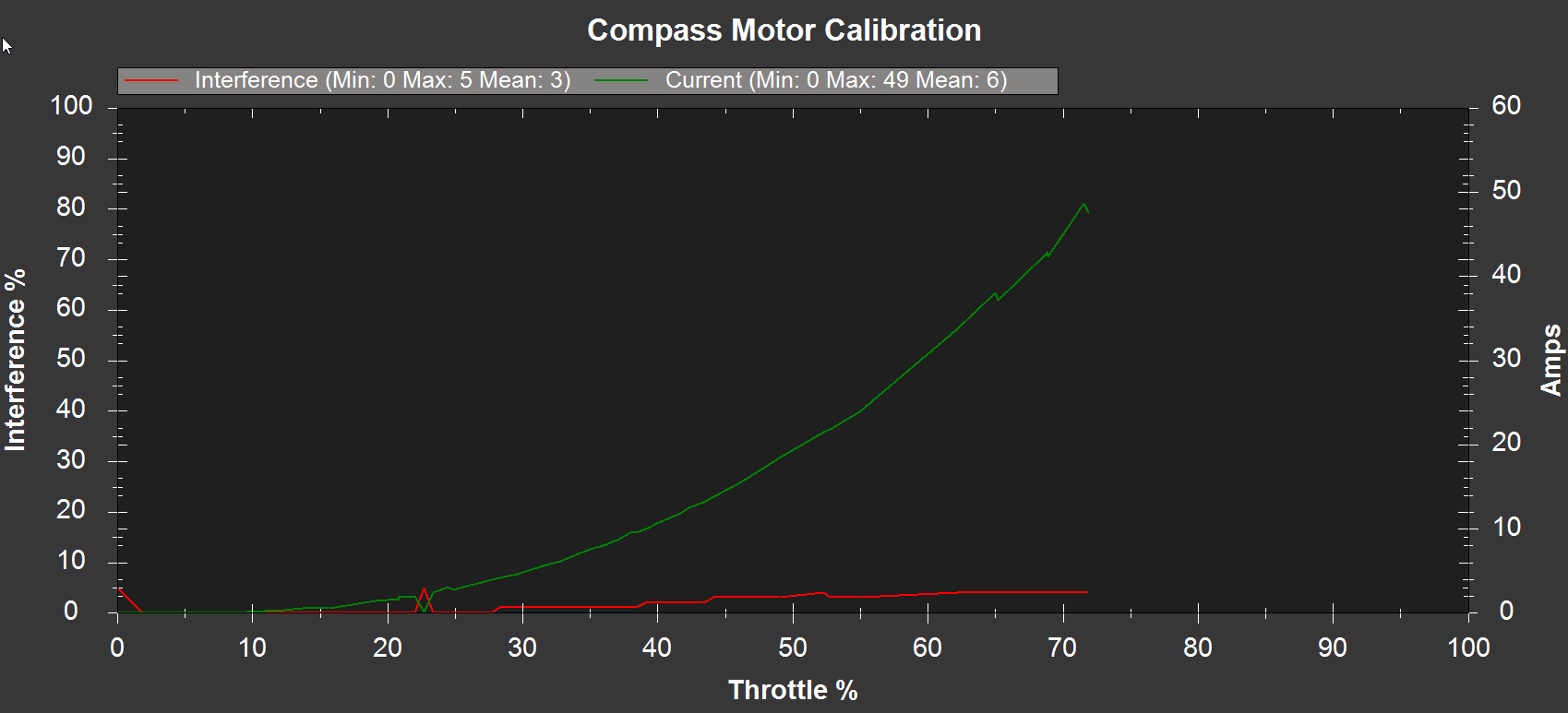
mag_field interference within limits (4.94%)
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.17, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = UNKNOWN - tuple index out of range
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
according to the documentation, that is well within the “good” range of 0-30%:
Check the % of interference displayed. If it is less than 30% then your compass interference is acceptable and you should see good Loiter, RTL and AUTO performance. If it is 31% ~ 60% then the interference is in the “grey zone” where it may be ok (some users are fine, some are not). If it is higher than 60% you should try moving your APM/PX further up and away from the sources of interference or consider purchasing an external compass (or GPS+compass module (some of these)).
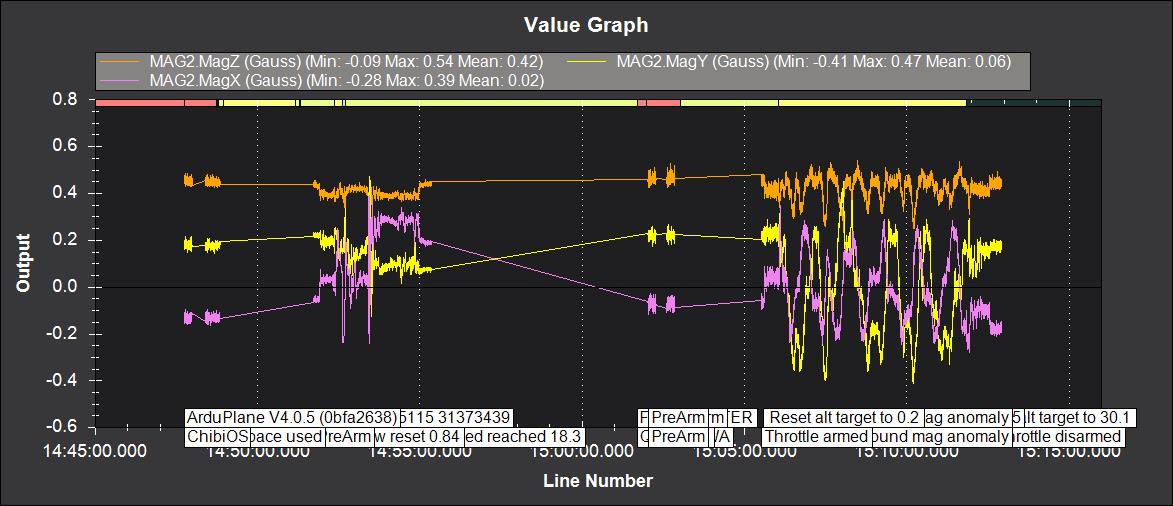
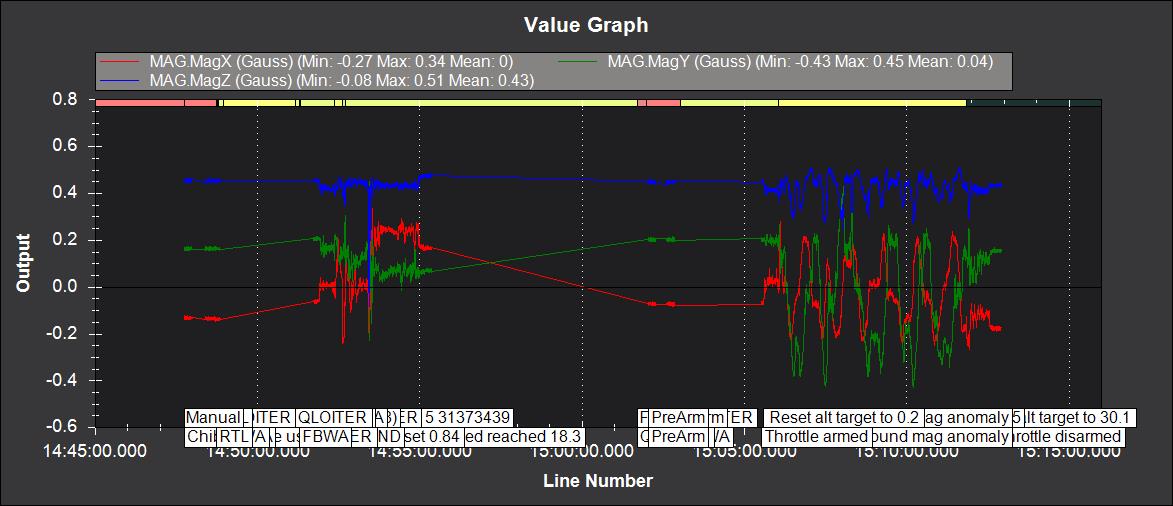
Is there a fix for this? I’m getting the same high offsets in quadPlane on compass one. I did several compass cals with default and relaxed settings, all turn out the same. If it’s OK then why is it yellow and fail on the auto analysis? Also received a EKF 2 Yaw -6.1 warning right as I transition from Qloiter to FBWA.
Any help would be great, I don’t want to put it into auto mode until I know it’s working properly. Thanks
Log File C:\Users\kylem\Documents\Mission Planner\logs\FIXED_WING\1\2020-06-12 14-47-45.log
Size (kb) 143885.96484375
No of lines 1421362
Duration 0:25:10
Vehicletype ArduPlane
Firmware Version V4.0.5
Firmware Hash 0bfa2638
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - FAIL: Large compass offset params (X:36.51, Y:-436.92, Z:287.58)
FAIL: Large compass offset in MAG data (X:36.00, Y:-436.00, Z:287.00)
Large change in mag_field (50.83%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.27, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = NA -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data