Hi,
I just installed the latest beta fw (1.7.3B7DB5CC) and there is no information for the new parameters.
would it be possible to get detailed information for each command setting?
Thanks
Julien
Hi,
I just installed the latest beta fw (1.7.3B7DB5CC) and there is no information for the new parameters.
would it be possible to get detailed information for each command setting?
Thanks
Julien
The user manual should have included most of the description on parameters.
The only thing new from 1.7 is magfilter.
It refers to filter for magnetic noise.
Thank you for the information.
But the user manual only include info about :
They are written separately by functions not by parameters, so it may be difficult to find.
gnssConfig refers to GNSS selection:
https://docs.cubepilot.org/user-guides/here-3/here-3-manual#4-modify-here3-gnss-constellation
passThrough refers to serial passthrough for ublox connection:
https://docs.cubepilot.org/user-guides/here-3/here-3-manual#2-here3-u-blox-chip-firmware-update
and uavcan.node_id refers to um… Here3’s node id in UAVCAN system
Thanks for you reply.
The links just take me back to the information I had already read.
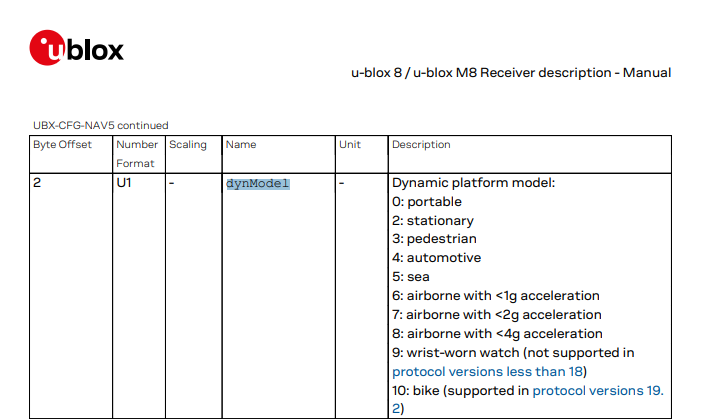
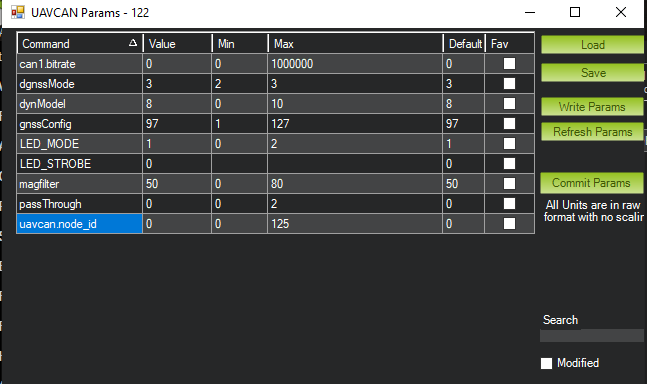
Maybe I didn’t explain clearly enough I was looking for more information about the other parameters shown in the first screenshot. Mainly the commands “dgnssMode” and “dynModel”
Just realized I have misread your question
dgnssMode is Differential GNSS mode limiter. Setting to 3 allows it to enter FIX mode while 2 can only enter FLOAT mode. Mainly for preventing too frequently mode change when the satellite signal is not good enough.
dynModel refers to the same parameter in ublox chip. You may check it from its manual
Thank you Alvin
These informations really helped me.
Hi Alvin… what about the magfilter?
is there any description, spec on that?
I assume is a low pass filter and thats a value in Hz… but haven’t
found any info about it
Its a low pass filter over the mag values
I’m Hz? Degrees? Gauss?
The unit is percent.
For example, 50 = 50/50 mix, which means taking average from 2 samples.
The equation is
mag.magnetic_field_ga[0] = (mag.magnetic_field_ga[0] * (magfilter/100.0f)) + ((-ak09916.meas.y/1000.0f)*(1.0f-(magfilter/100.0f)));
Perfect…