Hello, does motor number 5 correspond to letter A?
Ex:

Hello, does motor number 5 correspond to letter A?
Ex:
i believe so yes.
Yes.
Do I need to change something in the motor output?
To clarify does main out 1 on the cube means motor A?
So I need to change the servo output so 1 will move motor A?
No leave those in place unless you’ve got a Kore carrier board.
When you use the motor test in MissionPlanner it tests front-right first and so on around clock-wise.
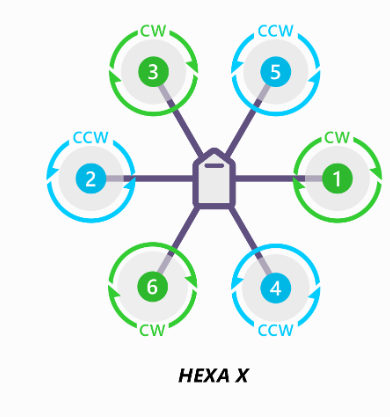
So with a Hexacopter:
“A” will be motor 5, then “B” will be motor 1, “C” will be motor 4 etc
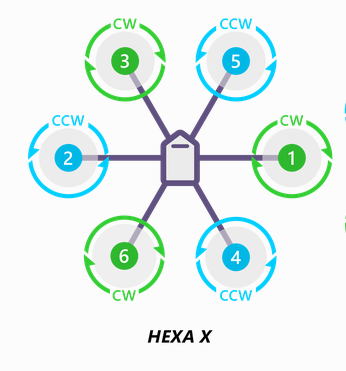
I just noticed the MissionPlanner motor order diagrams are missing from down the bottom of this page, leaving just the Quad example:
https://ardupilot.org/copter/docs/connect-escs-and-motors.html#motor-order-diagrams
So you are saying that I need to plug in motor A to main out 5 on my cube because port 5 on my cube spins motor A?
Just leave motor 1 plugged into servo1 (or M1) output and so on numerically using the diagram shown above - the difference comes when you do mission planner motor test :- the numbering changes to lettering and the order is different, but it’s just “cosmetic” -> the hard-wiring you’ve already done stays the same always.
The reason for testing with the MP motor test is that it’s extra test that you’ve got everything configured correctly. If you test (MP)Motor A and (real)Motor 1 spins then you know you’ve got things hooked up wrong.
Using the MP motor test it’s easy to see if your props are spinning the correct directions.
Also you can check what is the minimum PWM you need to reliably set MOTOR_SPIN_ARM and MOTOR_SPIN_MIN.
Ok so when I test Motor A (MP) motor 5 (real) from the chart above spins up (which is plugged in main out 1 on the cube)
And when I test Motor B (MP) motor 1 (real) from the chart above spins up (which is plugged in main out 1 on the cube)
Is this right?
If this is right then how do you think I got the wrong motor/rotation on the wrong RCout channels…
You have the correct idea, yes.
In you other post “1st Flight Crash Hexacopter HELP” the number 1 cause of of the tip-over shown in that video is because of motor order being wrong.
