I thought of a few edits actually
You are running both EKF2 and EKF3 at once - that might not be an issue and I think plenty of people are using EKF3 now. And it will be the default soon. Probably for a hex of this size and cost I’d stick with EKF2 which is tried and true, at least until tuning is sorted out better.
I guess you have EKF3 enabled for object avoidance? I would disable all optional features until the debugging and tuning is finished, then enable the additional features.
AVOID_ENABLE,0
EK3_ENABLE,0
Only the “AVD” params are required for avoidance using ADSB.
I’d set this boot delay to allow CAN devices (eg: GPS) to boot up before the Cube
BRD_BOOT_DELAY,5000
There’s a couple of other battery voltage related mistakes, set these:
BATT_FS_CRT_ACT,1
BATT_ARM_VOLT,44.3
BATT_CRT_VOLT,42
BATT_LOW_VOLT,43.2
MOT_BAT_VOLT_MAX,50.4
MOT_BAT_VOLT_MIN,39.6
The MOT_BAT params will help with the tuning too.
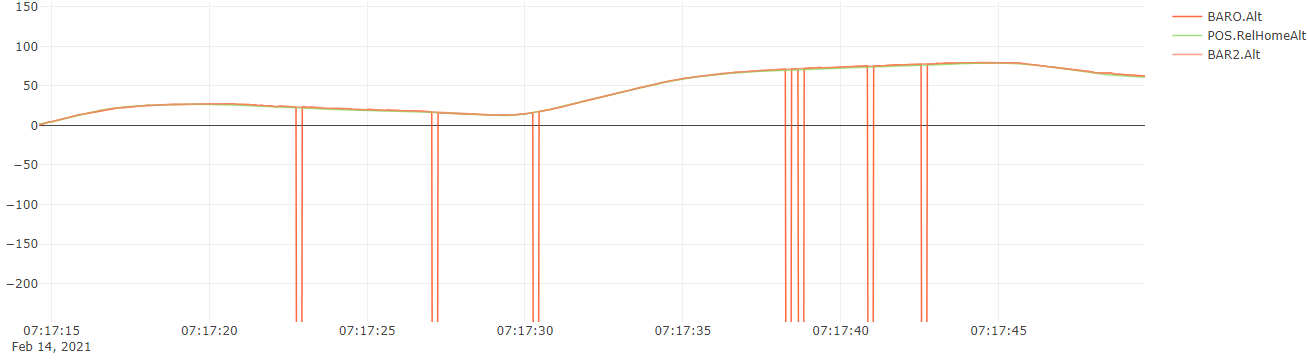
The Barometer is going crazy, but Baro2 is working OK - not sure what to do about that yet. Maybe lets check it in subsequent flights after the fix-ups
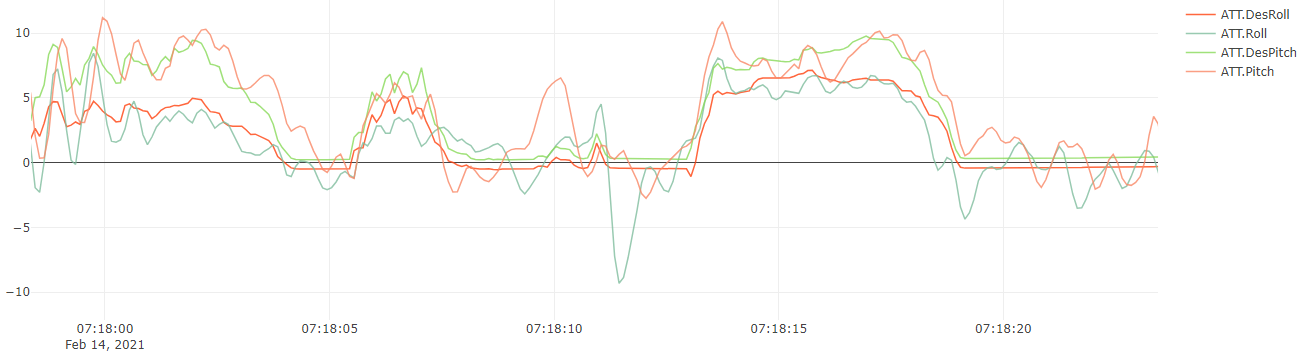
Tuning needs some work, and will be a big contributor to the rough landings
I think these are too low
INS_GYRO_FILTER,15
INS_ACCEL_FILTER,10
I couldn’t tell from the pic what prop size you’ve got, but took a guess and I’d probably set these until we know more details.
ATC_RAT_YAW_FLTT,10
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,20
Let us know the prop size.
If you using T-Motor Flame ESC’s then set MOT_THST_EXPO,0.2
It will definitely be worth the time and effort to set up the Harmonic Notch Filter
Do a test flight with these params (and all the rest from above), stick to just hovering for a while, and maybe a few gentle movements.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
Post that .bin log file and we’ll go from there.
Once we’ve got these things nailed down, we can move onto PIDs and Autotune - there’s work to be done there!
Have a read over the Tuning Guide too, it definitely applies to these larger aircraft.
https://ardupilot.org/copter/docs/tuning-process-instructions.html
EDITS
Landing in Stabilize mode will always be a bit tricky. AltHold will be a better mode to use for testing and almost all flying except for when you want LOITER mode. It’s excellent that you’ve done a lot of flying in Stabilize mode as that is still the emergency go-to mode.
AltHold has the freedom of movement of Stabilize, but holds altitude (obviously) and “throttle” is from the centered position.
Actually spring-centered throttle is the way to go, and set PILOT_THR_BHV,7
I think you could set these PIDs and it will help before the next test flight, but as per the Guide, reduce them if there’s oscillations, particularly the ANG P values.
ATC_ANG_RLL_P,6.5
ATC_ANG_PIT_P,6.5
ATC_RAT_RLL_P,0.10
ATC_RAT_RLL_I,0.10
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.10
ATC_RAT_PIT_I,0.10
ATC_RAT_PIT_D,0.005