Also getting: “Check FS_THR_VALUE”
You only need to change MOT_THST_EXPO,0.77 for those props and ESCs - so far - and the other parameters I mentioned previously.
Setting EK3_ENABLE,0 shouldn’t throw all those errors as far as I know, that’s how it is by default.
You’ve rebooted after those changes?
So here’s a complete list of my suggested changes so far:
ATC_ANG_PIT_P,6.5
ATC_ANG_RLL_P,6.5
ATC_RAT_PIT_D,0.005
ATC_RAT_PIT_I,0.10
ATC_RAT_PIT_P,0.10
ATC_RAT_RLL_D,0.005
ATC_RAT_RLL_I,0.10
ATC_RAT_RLL_P,0.10
ATC_RAT_YAW_FLTT,10
AVOID_ENABLE,0
BATT_ARM_VOLT,44.3
BATT_CRT_VOLT,42
BATT_FS_CRT_ACT,1
BATT_LOW_VOLT,43.2
BRD_BOOT_DELAY,5000
EK3_ENABLE,0
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,20
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
MOT_BAT_VOLT_MAX,50.4
MOT_BAT_VOLT_MIN,39.6
MOT_THST_EXPO,0.77
You can actually copy/paste them from here into notepad (in Windows) and save that as a file with .param as the extension, and load and apply those settings via MissionPlanner. This avoids trying to find them all and make typing errors.
OK, I see now…
This should solve those errors:
AHRS_EKF_TYPE,2
EK2_ALT_M_NSE,3
(edited)
Perfect I will apply those prem changes.
Also, what is the recommended reserve current?
I am using two maxamps lipo 10900 6-cell 22.2v battery packs connected in series.
Thanks,
Mike
I need help programming my drone and I am looking for someone to hire immediately. It is a Tarot x6 with a herelink Transmitter. Can anyone help me please. Thanks.
OK the only error I am getting is “check FS_THR_VALUE”. My throttle PWM’s are from 1100 to 1940. My current value of FS_THR_VALUE,1090. What should it be?
ok I moved the FS_THR_VALUE from 1090 to 1080 and the error has gone away.
Only error that I am getting now is "Error pos VERT variance".
Any suggestions?
Can you help determine what was the caused of my flight failure today… My first flight went great with the exception of me having to constantly correct for roll right while flying in Atl-Hold.
While 2 minutes in to the second flight and while flying in Atl-Hold I experienced very bad constant rolling from left to right and was unable to regain control. Luckily I was able to switch in to stabilize mode and was able to bring the drone to a landing unharmed. But, while descending I still did not have full control as I had to fight against the rolling form left to right.
Attached are a copy of my flight logs. I’m thinking that it might be GPS related but not sure…
Mike
2021-02-20 11-48-28.zip (3.8 MB)
OK that wasn’t very impressive ![]()
Let’s swap the priority of the Baro’s since the first one is still crazy, disable Object Avoidance just in case it interferes, and wind back the PIDs closer to what it was before:
GND_PRIMARY,1
OA_TYPE,0
ATC_ANG_PIT_P,5.0
ATC_ANG_RLL_P,5.0
ATC_RAT_PIT_D,0.006
ATC_RAT_PIT_I,0.13
ATC_RAT_PIT_P,0.13
ATC_RAT_RLL_D,0.006
ATC_RAT_RLL_I,0.13
ATC_RAT_RLL_P,0.13
Now you’ll need to do the “Level Horizon” calibration. First check your transmitter and make sure there’s no trims set.
Set up the aircraft on solid ground, connected to Mission Planner, and go to the Accel Calibration page. Don’t worry though, we’re only going to do “Calibrate Level”
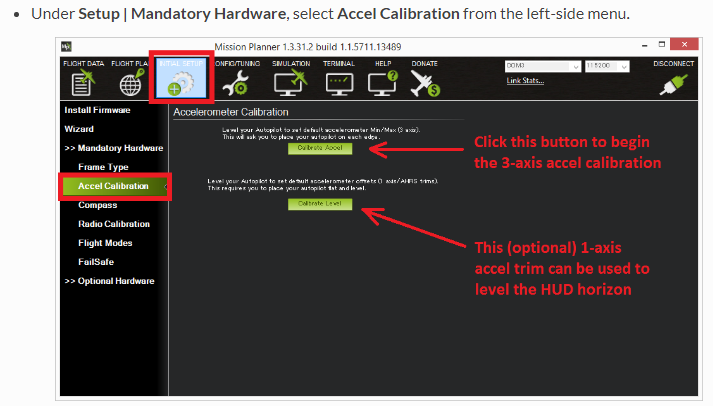
Get the “prop disc” perfectly level by wedging or packing the landing gear and using a spirit level across opposing motors - when you are satisfied the whole frame is level in all directions hit the “Calibrate Level” button.
We made a very light weight spirit level from a piece of aluminium angle and glued on a string line bubble level - it doesn’t weigh down the aircraft.
Now for a test flight - just take off to a couple of meters height (6ft) and see how that goes. Do very slight pitch and roll stick movements to check control and watch for oscillations. The aircraft should be level and not inclined to rolled or pitched in one direction without stick input.
If there’s noticeable oscillations (worse than before), reduce these to:
ATC_ANG_PIT_P,4.0
ATC_ANG_RLL_P,4.0
ATC_RAT_PIT_D,0.003
ATC_RAT_PIT_I,0.08
ATC_RAT_PIT_P,0.08
ATC_RAT_RLL_D,0.003
ATC_RAT_RLL_I,0.08
ATC_RAT_RLL_P,0.08
If oscillations appear smoothed out or almost gone, do a little more gentle test flying, nothing too radical.
Make note of whether the oscillations appeared better or worse at each stage, let’s see the log from this simple testing.
EDIT: there’s still a significant weight imbalance, heavier on the right hand side.
Thank you!! I will give it a try and let you know how it works out.
I will check the balancing.
Waiting for a new battery to arrive. Once I get it in I will resume test flight. Thank you for your help.
OK just received two brand new battery packs for MaxAmps. They are the 23000 22.2V Ture 25c 510.6 Wh LiPo packs. What would be the recommended current and voltage reserve settings for these packs? I’ll be running both in Series.
The voltage settings remain unchanged
What would you recommend for the reserve current value?
Being the I am using a 23000mAh LiPo battery pack, what would you recommend that the values for
BATT_LOW_MAH
BATT_CRT_MAH
be set to?
I would go for 30% and 10% with you’re copter.
How precise is your power module?
That sounds safe. Thanks. My Power module has good accuracy.
Tried taking off today with the config‘s above. Directly from lunch my drone went into bad oscillation and crashed. It also flipped upside down. My first flight seem to be fine but towards the end of the flight I experienced the bad oscillation.
Any suggestions on how I can get rid of this oscillation problem that I’m having?
hi, did you try changing the landing speed?
Can you share the flight log for this crash landing?