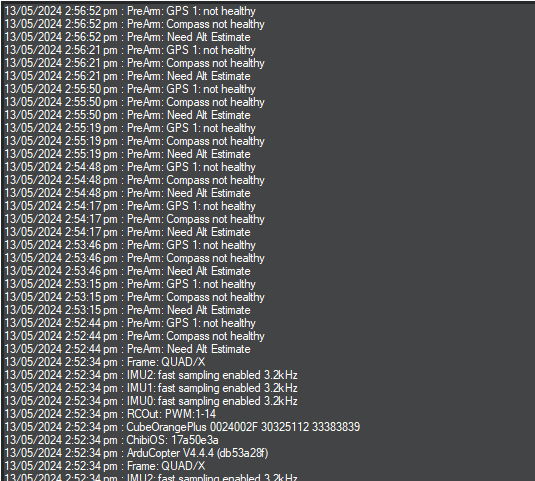
Hello, I have an M1200 quadcopter with Here4 and Cube Orange Plus. Flight perfromance is stable and I have done a number of flights with it. Recently, I have started to get a PreArm GPS1 not healthy and Compass not healthy message everytime I reboot the sys. SatCount shows 28 satellite connected and GPS indicates 3dgps fixed but EKF is red and I get constant Pre Arm prompts of GPS not healthy and Compass not healthy as can be seen in images. What can be the issue and how can it be resolved?
@Alvin , @Michael_Oborne, can u suggest how to proceed… satellites are there but due to error messages, uav cud not arm… the message persists in 3-4 sys now…
Which version of firmware is your copter using?
Do you update the firmware before having the issue?
Compass not healthy: Try Accelerometer Calibration then check if it still exists.
GPS not healthy: Low baudrate might cause GPS not healthy, try make it higher.
If everything is alright, try change it to a lower version and see if the issue still exist.
Thanks for the response.
Actually, we upgraded the hardware of our copter sys by changing the GNSS, replacing here 3 to here 4. The idea behind replacement of here 3 to here 4 was to have better performance with industrial grade compass and dual band antennas. As prev explained that our copter flew quite a few times with here 4 and we had successful flights. The problem which we are mentioning to appeared suddenly (at random) just when we were about to fly and trying to arm the uav sys. We tried multiple iterations by changing the parameters and configuration but with no success. Then our client reported the same issue that is being repeated in 3 x sys. How is this possible that hardware issue appears in many sys while we had multiple flights with the same sys??? If this happens at random, then is it possible that problem might appear in the middle of flight?
Unfortunately, despite of tagging the Cubepilot team no of times, none of the member has yet contacted or replied to us. Hope @philip@Alvin go thru this blog and suggest the soln…
Regards
@Cybra Hi, I am facing the same issue. FW of arducopter is 4.4.4 and Here4 Fw is 1.14.5AC6523C and HW version is 4.19. Compass is not detected on either of the two comm ports. When i connect Here3. It works fine. Your guidance is requested in this matter.
We are connecting here4 via CAN port, tried both CAN1 and CAN2. GPS connects and satellites data available, however campus is not detected and no data available.
Also updated here4 using MissionPlanner, but results remains the same. @Cybra
After posting here I read other related threads, and checked here4 data on CAN inspector, megnatic field data was not available for fault modules
Might be the same issue as this thread SB_0000008 Here4 magnetometer (Flight status Restored)
Can you send me the parameters and the UAV/CAN inspector on the Here4 that has compass issues? Try to set FORMAT_VERSION to 0 and reboot then see if the compass is back after saving the params and checking the inspector