Cubepilot
Problem setup here3 GPS (CAN) and Emlid M2 as 2nd GPS
Here GPS
fajarsep
(fajarsep)
19 March 2021 08:46
3
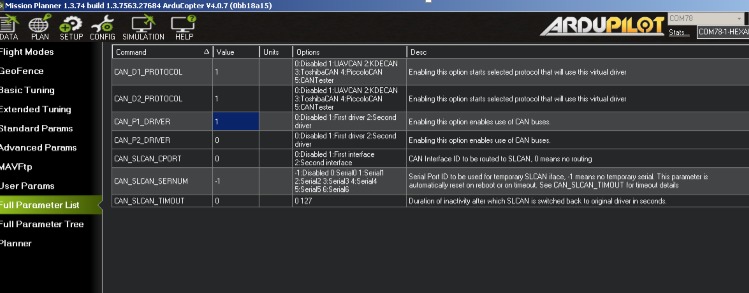
I only change gps1 param to work with here3 (CAN)
image
749×293 54.5 KB
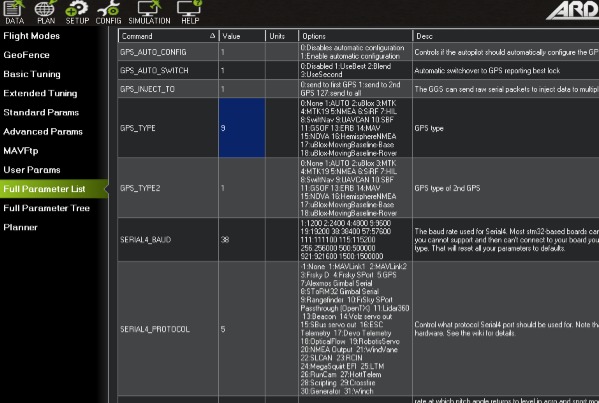
and this is for gps2 param
show post in topic