Hello,
We’ve updated all of our HERE2s to the latest firmware as posted in https://docs.cubepilot.org/user-guides/here-2/here-2-instruction
However, some of the units have begun to display very long lock times (10+ minutes for a solid lock) and erratic compass behavior, often signaling bad compass health until they are rebooted multiple times. Calibration does not help. All units on I2C.
These GPSs were working before the update, so we would like to re-install the previous firmwares for the time being until we get to replacing all of them.
Can CubePilot provide us with a few of the previous firmwares/bootloaders so that we can try this? I realize this is unorthodox, but it’s the best solution for us right now.
Thanks.
Please update to using CAN.
Long lock times are a function of something else, it could be the actual uBlox settings. If you are on Serial/i2c then the firmware on the Here2 has nothing to do with the GPS.
Best to post some logs and find out what’s really going on.
@sidbh @jschall
Please update to using CAN.
Trust me, I would love nothing more than to update all our drones to CAN. Unfortunately, that is not something we can do right now. We do not have the right resources nor the right amount of testing to make that move in live operations. We have no choice but to get it working over I2C atleast for the next few weeks. What frustrates me is that we have had a working setup for months now, and it has become unreliable overnight with the recent batches of the HERE2s. All I ask for is the ability to go back.
I hope you understand my perspective.
Long lock times are a function of something else, it could be the actual uBlox settings.
Are there known uBlox good settings that we can try to set? Could those have changed with the bootloader or firmware? We found that the GPSs we updated also suddenly started getting “Bad GPS Signal Health” errors on them.
Best to post some logs and find out what’s really going on.
We don’t have any currently because disarmed logging is turned off. We’ll get some logs soon though.
There is nothing in the bootloader or firmware that affects the GPS at all. It is 100% bypassed in i2C mode.
Once we have the logs, we can figure out what is wrong
I am also having this problem. Intermittent Compass Health Issues that require restarts. We saw long lock times before the update but they got better after.
I am also using I2C.
3.7 master and beyond support CAN, however it is still under development and is very much in beta, from what I understand. Is this correct?
Is there a path forward to fixing I2C issues?
Sorry for hijacking this post, but I believe we are experiencing the same issues.
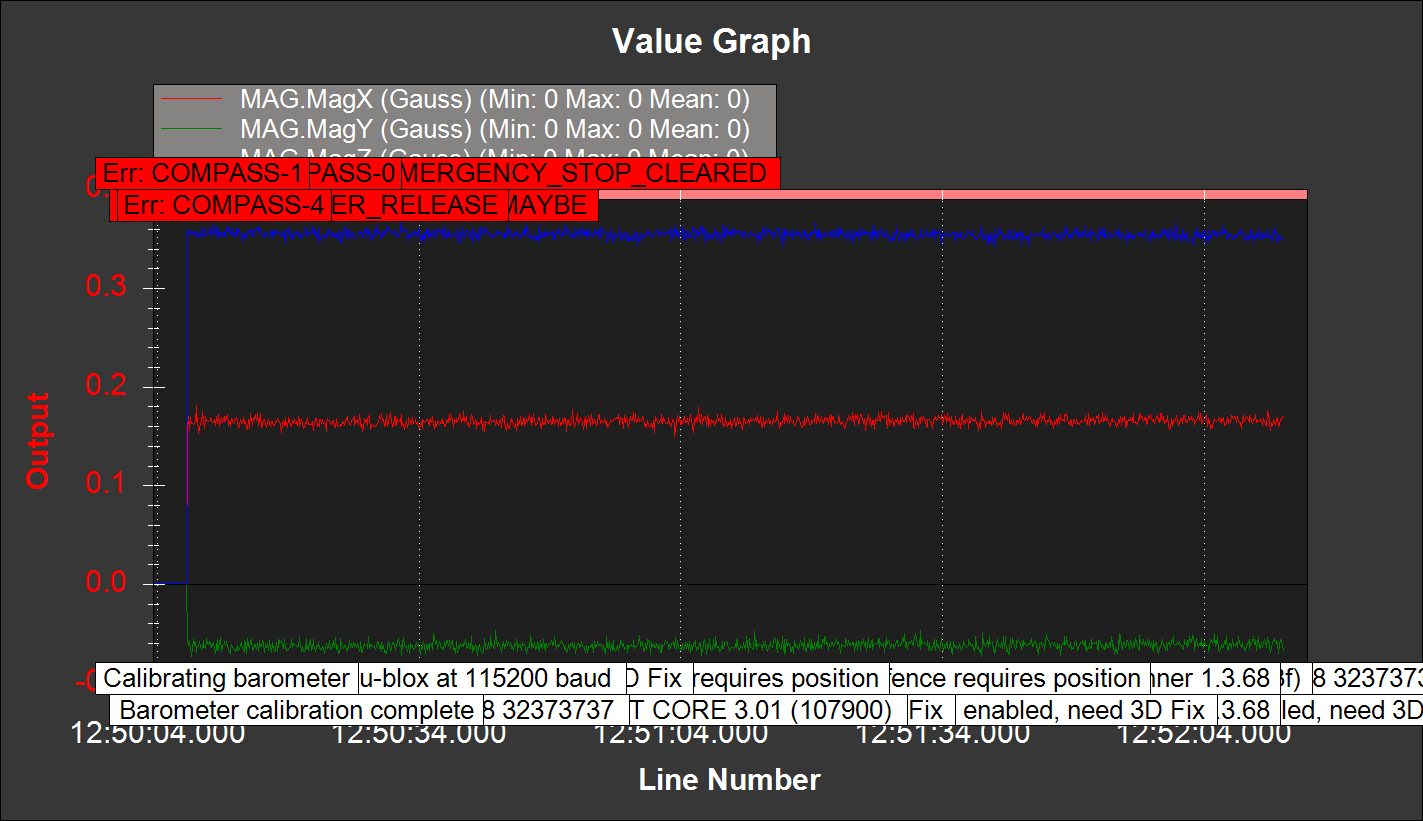
Attached below is the log of a compass health error drone.
This is after updating the Here2 over SLCAN and changing it back to I2C. This error is intermittent, and we have yet to determine a causality on our end.
Below is a snapshot of the problem log. It looks like it keeps repeating GPS initialization messages.
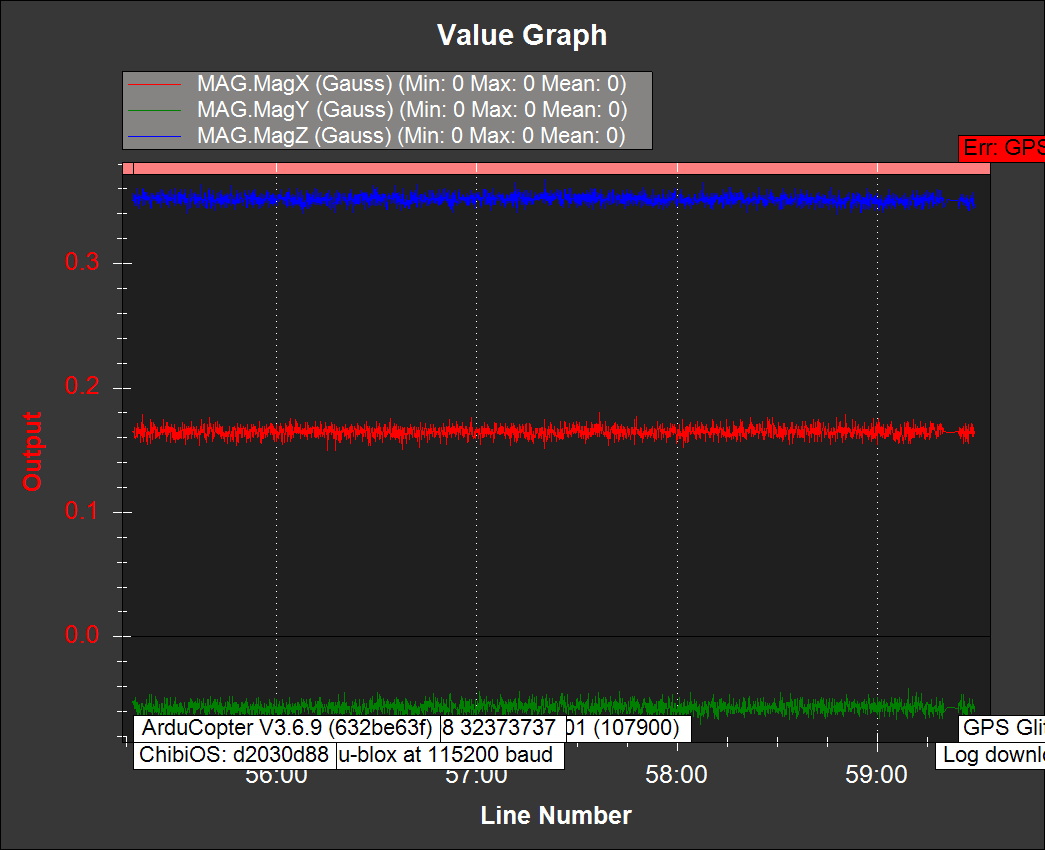
Juxtaposed against a good log from the same machine.
No, Can has been supported since 2015 in Ardupilot. It is well past “Beta”
3.7 has some additional features that make using CAN much easier, these include Auto node ID allocation, and SLCAN mode built in.
I have been finding people have not been following the instructions exactly, and when they get to updating the firmware, they are not putting the firmware from the link onto their here.
Can you confirm you did the bootloader firmware update?
Yes I followed the here 2 slcan update guide. Prior to updating, pre arm checks would always fail if geofence was turned on. Now this issue.
Is there a procedure for using CAN on 3.6.x released
Yes, use master to set the can ID manually on the gps, then switch back to 3.6.10
Here is some more logs
Edit: And some more
Edit: And some more
EDIT: Got ID setup in parameters of SLCAN. ‘Write’ vs ‘Commit’ hitched me up for a second. But eventually figured it out.
Do you think an ID of 125 will work for all 3.6.10 cubes? Assuming that we don’t have another CAN device.
So how do I set the CAN ID manually?
Just tried downgrading a working 3.7 master to 3.6.10. No gps, and only 2 internal compass IDs show up. What did I miss?
3.7 Master Log:
3.6.10 Log: