Hello,
My current setup is a pixhawk 3pro that is connected to the here+ v2 RTK rover via the 6 pin setup modification, and connected to the pixhawk is my telemetry radio from Holybro (telem 1).
On the Base side, I have my windows laptop connected via usb to the here+ v2 Base station with mission planner opened up. In addition, the other telemetry radio is connected to this windows machine as well.
Both devices (rover and base) are running 1.3 Fw version (No modifications). The Rover has secured a 3d lock and is flashing green (good), and the base station has completed the survey-in both in u-center and mission planner to my desired requirements. I have this screen on Mission Planner on the Base side :
. My radios have a solid green, except that the base side radio has a dim rid blink which means it is only receiving, but not sending any data. The rover side radio, on the other hand, is blinking a strong red which means it is sending. It seems all my devices are working except that I’m not sure why mission planner isn’t automatically sending the RTCM3 corrections. Does the pixhawk 3pro need special configurations to receive rtcm3 through its telem port?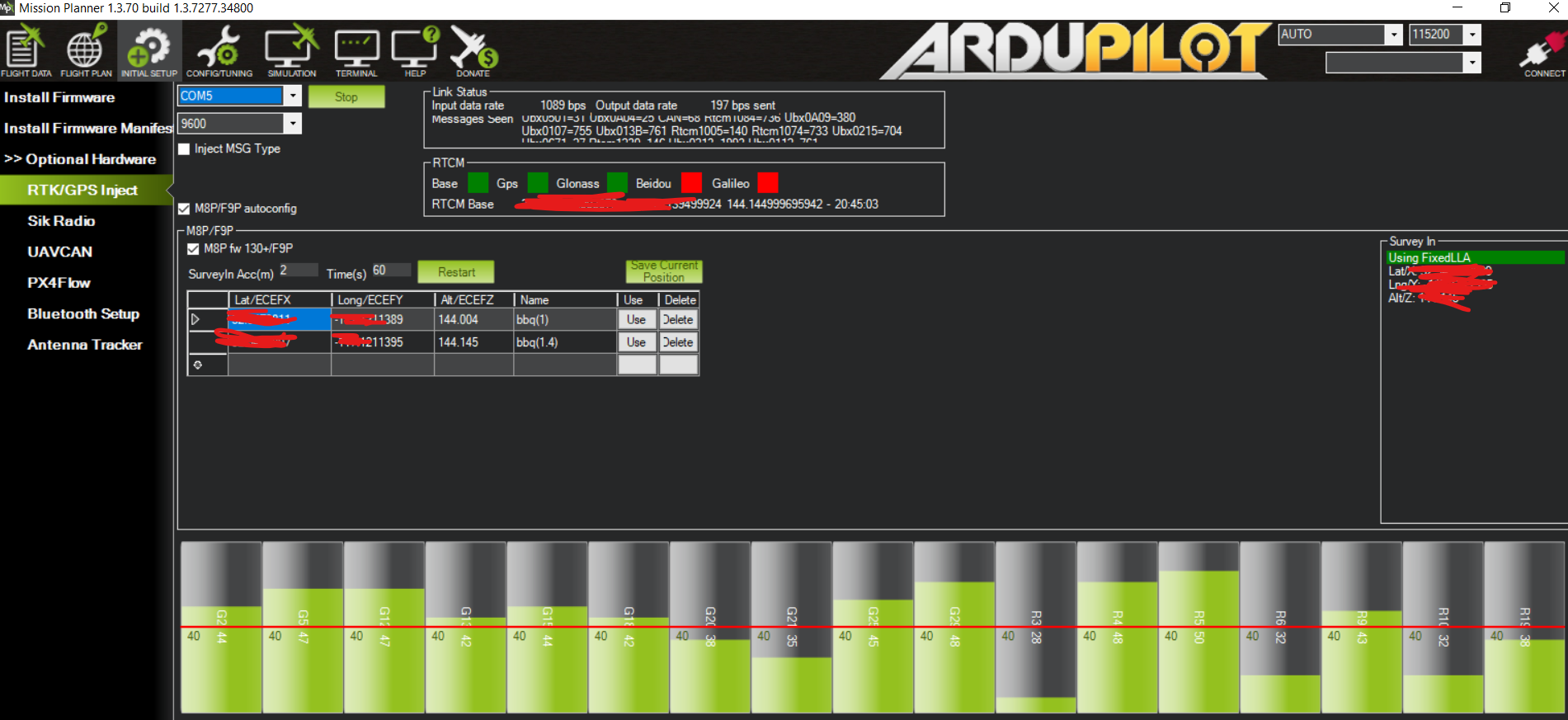
Thanks, any help would be appreciated