Hi, i’ve been reading about Serial bus outputs in teh cube orange AP, in order to control serial devices, but since the information is not specific nor consolidated so I will write here what I’ve understood so far so I can get confirmation from you guys.
So:
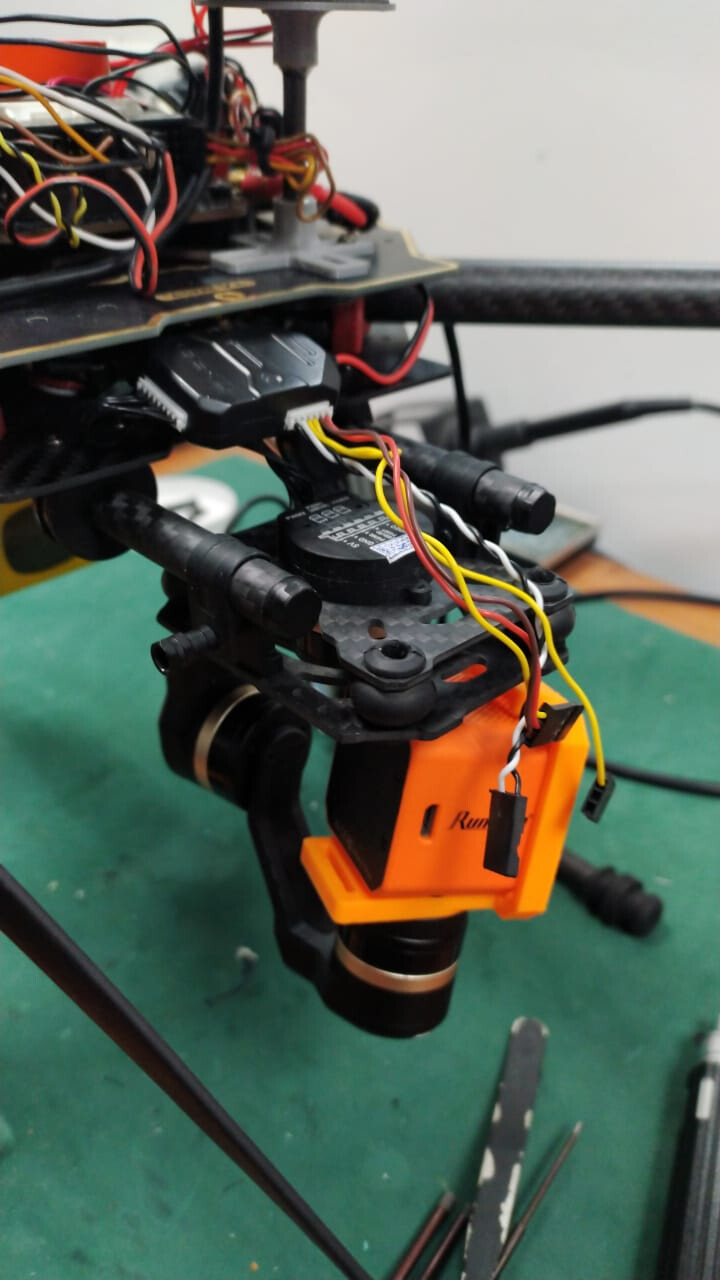
The serial bus output is the rail inside the yellow square in the image below with the tag “SBuso”, right?
So in the herelink air unit, I would configure the channels that I want to control, in this case, I will use #5 and #7 for tilt and pan control respectively.
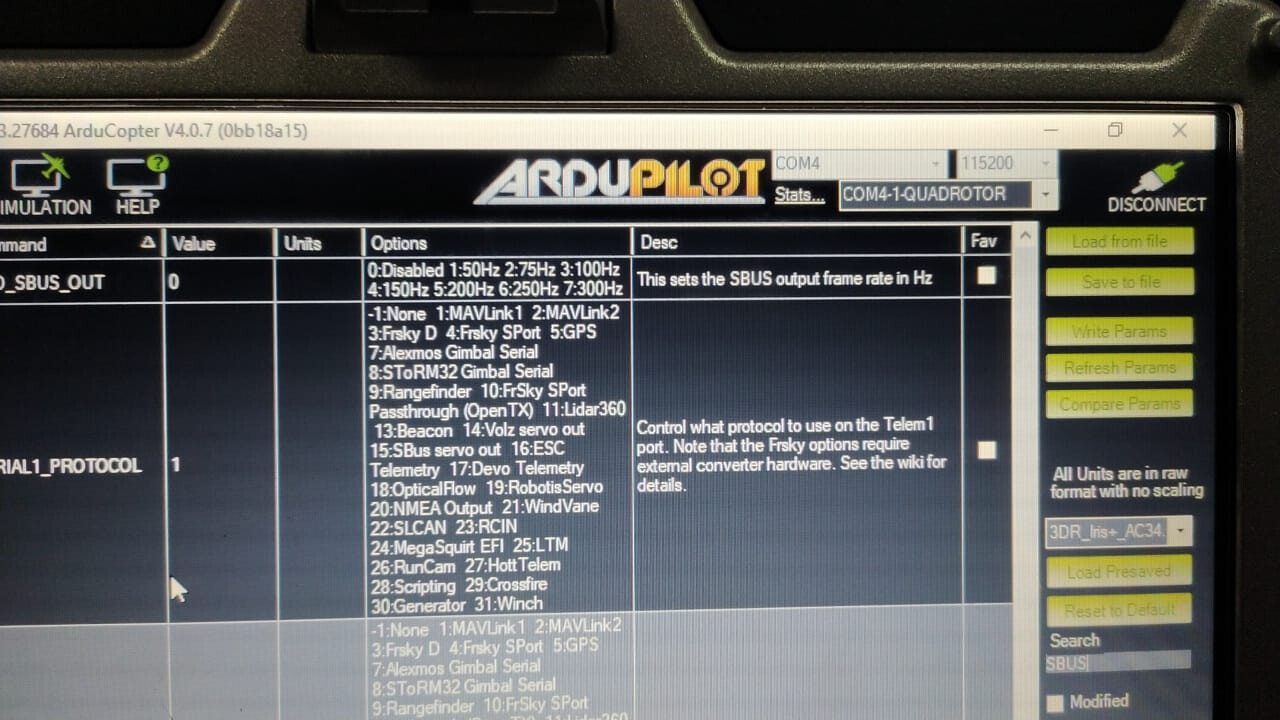
Then, in mission planner I will enable BRD_SBUS_OUT.
As a sidenote, the cube orange manual is by far incomplete! I guess that de developer team should expand the cube orange manual found in the docs.cubepilot.com
We have the same gimbal along with a herelink. Couple of things to note:
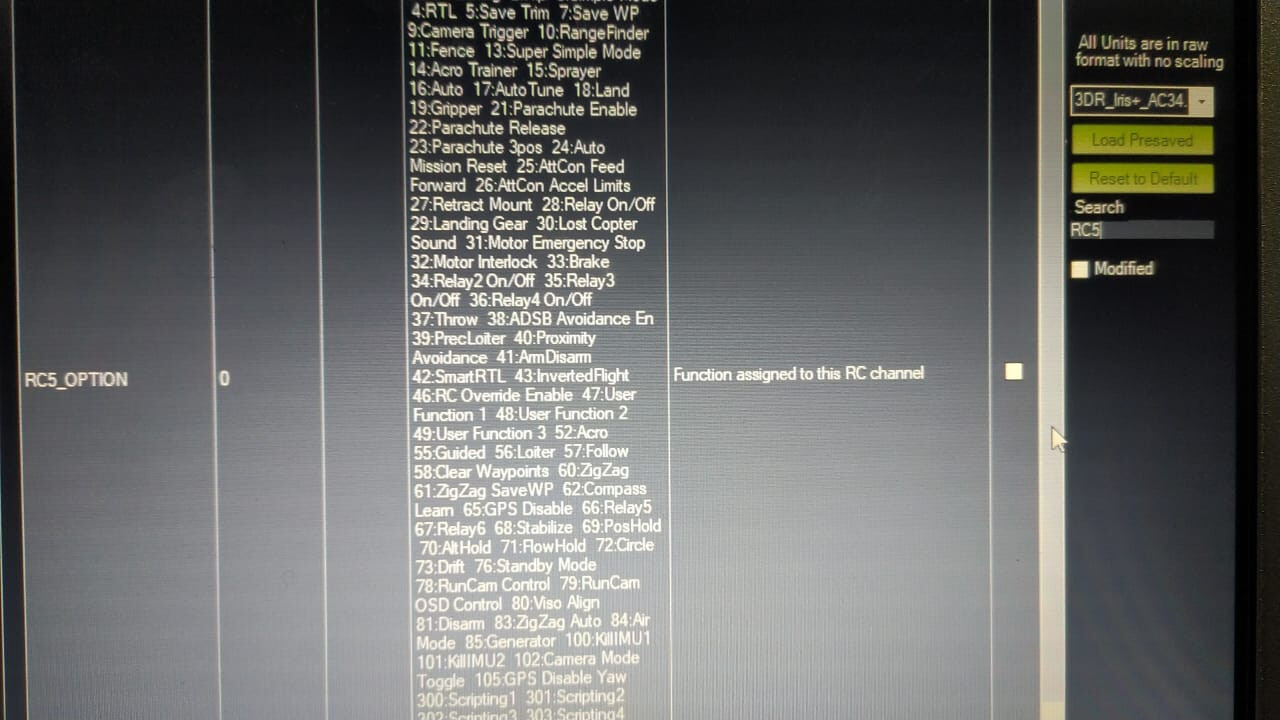
You use ServoX_function, not RCx_function. The first couple of servos will be used for your motors, so only use 5 if you’re running a quad, otherwise stick to servo9 onwards.
I have Servo9_function set to 55 which is RCPassThru5 (i.e. Channel 5 passthru). You can pass through channels 1-16 using 51-66, see here. On the tarot gimbal software, set the channel to the corresponding servo number, e.g. I have Channel 9 set for tilt as I mapped rcin5 (hardware wheel) to servo 9. Hope that makes sense.
There are 2 sets of 3 pins, the ones next to the power1 port is the sbuso, I’m not sure what the other 3 are for. Also, did you get your polarity right?
Send a bin or param file of how you had it set up for sbuso, I’ll have a look.