Would you share how you were able to complete the autotune without having the battery drain as before?
I am facing a similar issue where the battery drains out while the autotune on one axis is not completed yet.
Hi,
i had this issue with our smaller drone, an X8, and our old 6s lipos. I managed to tune each axis one by one with the lipos charged at maximum. Some of them were more efficient than other.
Final autotune on 3 axis took less time to complete. That’s how it works for me.
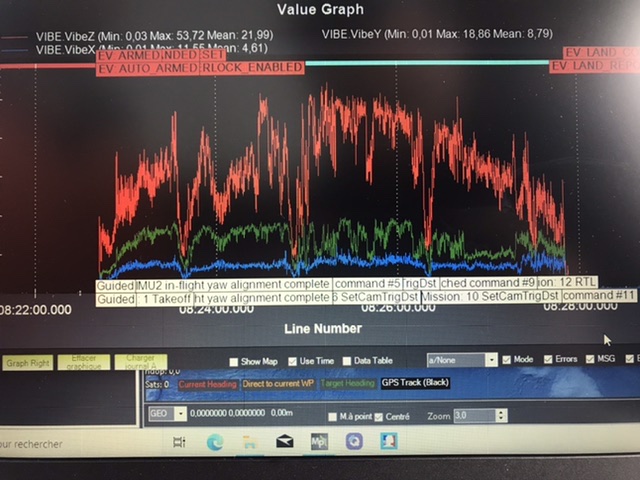
We have an issue with vibrations on our quad. When flying, we can see the arms moving strongly and its causes vibrations alert on the flight controler. We also have some screws on the frame poping out.
Main screws are tight with threadlocker and don’t move at all.
The thing that ennoy us is that we are unable to identify the source of those vibrations. Props and motors are well balanced.
The perfect example is when i do direct ESC calibration, the signal does not pass through the pixhawk. Whatever the level of thrust, nothing at all moves, no vibrations.
Once the pixhawk reconnected, i get the vibrations you can see on the video.
Looks like the boom is twisting and bending because of how its area moment of inertia of cross-section is decided.
Make sure those arm joints are tightened enough and secured with a good adhesive. I earlier saw a picture where the boom had ripped off the aluminium joint.
And if it’s flame ESC, there are lot of things to take care of. Some have fixed PWM, and some don’t. Hope you have bench tested the motor and have right EXPO. Also check for noise on PWM line with a CRO.
To be honnest, i just did a throttle calibration, it looked good to me when directly plugged.
I understand that i have a lot to check in order to delete thoses vibrations. Online documentation for thoses Flame 180A are unavailable and I reach my limits of knowledge
I had the same bad experience with an Heavy Gryphon X8.
One of the arms folded up in flight…
After the crash i discovered that these heavy arms are simply attached to the Aluminium parts by a little bit of resin and two M3*6mm screws, that’s crazy and not really professional !
Hey @Adrien_RunOI
I would suggest you to get mechanical things right before moving to ESC related things.
Make sure you get the frame rigid. Specially the joints.
With respect to Flame ESCs, Check whether they have fixed PWM or it need calibration.
You need to bench test the motor ESC setup and input values in below sheet to get you MOT_THST_EXPO.
We crashed our quad this week while in mission for our client.
The drone just stopped in mid air and fell off in the mountain. It tooks us 2 days to recover it thanks to last GPS position,LED still working at night so we could see its actual position and a amazing team of forest professionals.
Time to analyse why it crashed now. The drone stays a whole night with batteries working so the log is big.
We think that the circuit breaker might be guilty but so far, it remains mysterious.
If anybody here could assist me with parameters to watch in droneeplotter so i can analyse the crash, it would be really helpfull. The log file is 900mb, i can share it if interested.
If you want to download the Logs, here is a wetransfer. It’s heavy because the drone stays a whole night powered until we got it back in the forest. I don’t know if there is a way to save only the flight part of the .BIN file.
Looking forward to have you point of view. We suspect the engine cutter to have malfunction in some way.