Share log.
Here is the file to download.
I can display a screenshot of parameters if you guide throught values to select.
Thanks.
00000071.BIN (2.8 MB)
oh! You didn’t fly it yet? Take it out and try flying in stabilize mode.
Have you followed the new tuning instruction?
If the vibrations persists even after first flight, I can suggest something.
What are these new instructions ?
I have used the initial parameters v3.
Hi there,
I finally understood how to invoke the ESC calibration mode and make sure they get my min & max inputs…
I set ESC_CALIBRATION to 1 which enters the calibration mode whenever throttle is at full position at start up. Then, my motors reacts perfect without vibrations in this mode after calibration (it bypasses the flight control).
Once back to normal mode, i get some vibrations at low speed (still no props) and it gets better results as i increase the throttle.
I have no choice but to fly it now…
1 Like
Hi Adrian,
I was referring to the wires between the Mauch current sensors and unit, and the BEC to the pixhawk power 1 port. They have cable braiding on, I was wondering if you just slid the braiding over the connector and onto the wire of if you removed the wires from the connector, slid a smaller braiding on then reinserted wires into the connector?
Thanks!
Hi,
I just used a braid wide enough to fit the plug and the wire together in, i did not unplug anything. If you ply the plug 90° it gets thinner and can fit in the braid. Then, some skrinking tube and you’r done 
have fun !
Adrien
First Flight last friday.
We were inside a gymnasium to get rid of any wind and turbulences. We even got satelites fix !
THe quad i really stable and reacts well to input, it feels safe and has an enormous amount of power yet to deliver !
It was weighted with a 5kgs payload.
We only flew 10 min in 7 flights.
Next steps, fine tuning outside.
Best regards.
Adrien
1 Like
Thanks, that’s a good idea! I’ll give that a try, hopefully I can get them looking as neat as yours!
Congrats on the successful flight, looks pretty good and stable. What kind of payloads and all up weight are you looking at for your system?
We’ll have a drop system beneath linked to the pixhawk for auto flight. The total weight is 25kgs.
We are still doing fine tuning but we miss time and can fly only one day per week at the moment.
I’ll share my PID soon and install the Herelink controler.
2 Likes
Hi,
We managed to fly more this week and we still work on the tuning.
After some “stabalize” flight, we got more precise “alt hold” and “loiter” flights. I’am no confident enough to fly it on large translations, i wonder if an “autotune” would be relevant here. I didn’t try to push the sticks to their max, it gets stiff angles real quick !
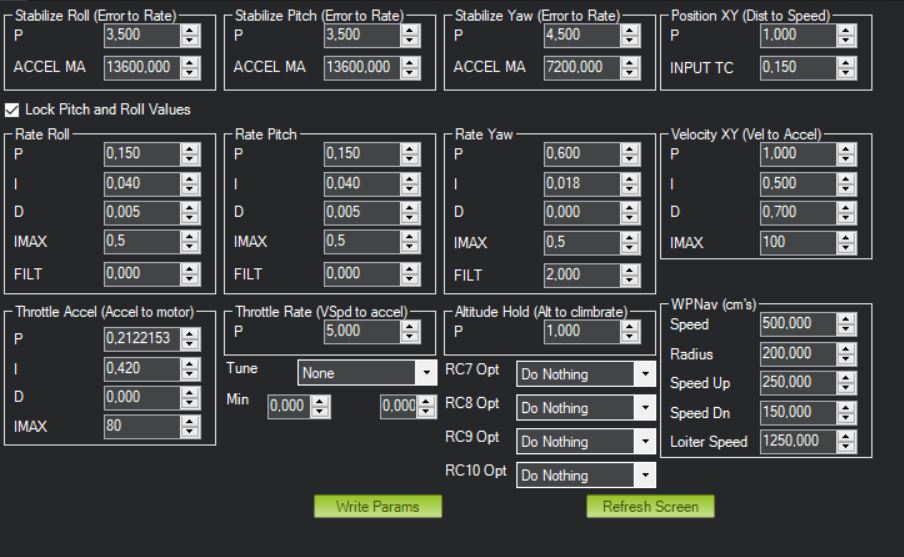
Here is our PID settings so far ![]() , Any comments or advices are welcome.
, Any comments or advices are welcome.
We had some Compass issues on the last flight and some Z axis vibrations.
If one of you can have a look, here is our last flight log.
Next steps are to set up the Herelink remote, use the RTK GPS and connect our custom drop system.
Cheers.
Looking good!
Couple of things from looking over the log:
- Your Z-axis vibrations are quite high, they regularly exceed 30 m/s/s which will cause problems. The clip parameter tells you how many times you hit the limits of the accelerometer (see documentation here). You hit almost 5000 clips during the flight, whereas an acceptable level is <100:
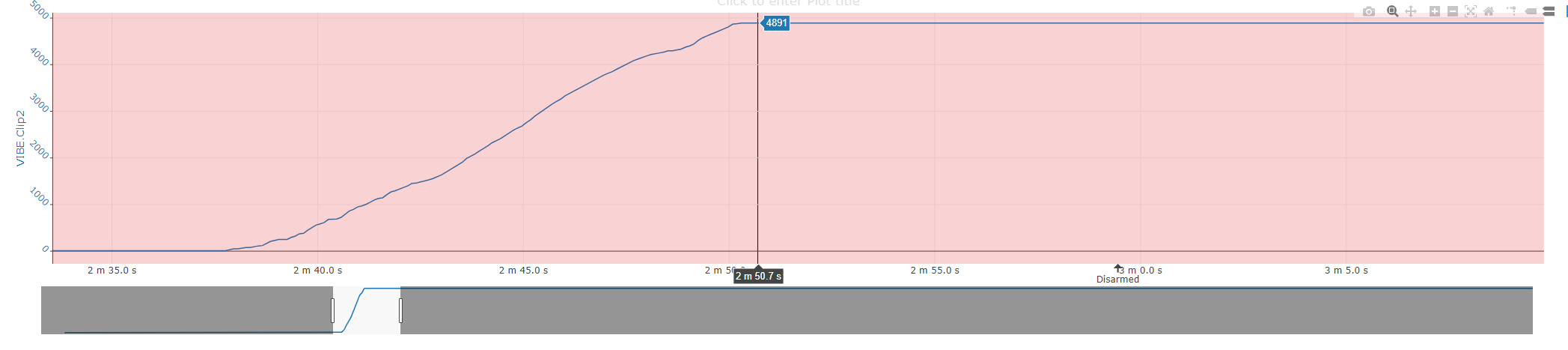
Look to see if there’s anything loose on the frame or if there’s anything flapping around near the flight controller. If everything else looks secure, you may need to use a vibration dampener. I had a similar issue and had to use a vibration dampener to get Z-axis vibrations down significantly.
*Your PIDs are quite low. This is clear in your log as desired and actual pitch/roll have significant deviations:
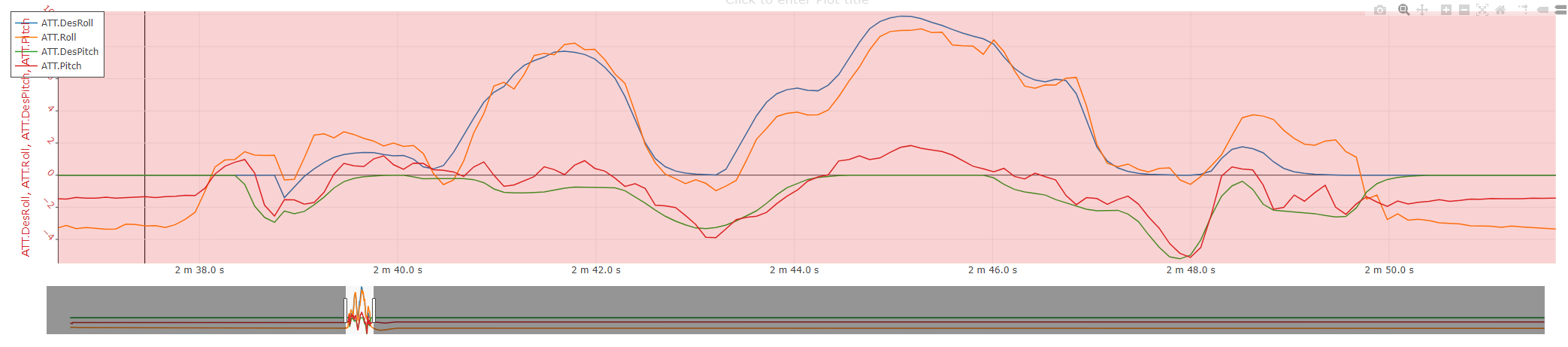
We have a Gryphon 1400 frame and our PIDs are quite a bit higher, with stabilise P around 6 for both roll and pitch and rate roll/pitch P around 0.21. Our tune is not perfect, still needs a bit of work but it flies okay-ish. We need to put it through another round of autotune to try and get it locked in.
I would recommend doing some more manual tuning and reducing the Z-axis vibration down to an acceptable level before attempting an autotune, otherwise you might get less than satisfactory results.
Hope this helps
1 Like
Hi,
Thank you very much, it does help a lot and confirm what we were thinking about our PIDs. (Without really understand where to start)
I’ll Check my setup to identify what’s causing the vibrations.
Cheers
1 Like
hello
i have tested my hexacopter 12s 22’’ for the first time and it flies so stable but i have problem in autotune when i finish it i don’t hear beeb that indicating autotune is finished can you guys help me out and maybe look at my logs and see what is wrong with it ?
2020-07-03 06-42-52.tlog (3.8 MB)
logs
log
param
Could you attach the .bin file, the tlog/rlog files are recorded by the ground control station based on the data it received so they aren’t overly useful
1 Like
Hello,
We did a test flight today after changing the paylaod and compass priority.
Really good results with perfect weather.
We engaged a PITCH autotune without being able to finish the procedure.
We’ll fly soon but not sure when.
As soon as we have results, i’ll pusblish PIDs.
Thanks guys.
Adrien
Hello,
We made an autotune flight today ! Perfect weather, no wind, no extra heat, no rain… Just a lot of fun watching the big bird tuning itself !
New PID
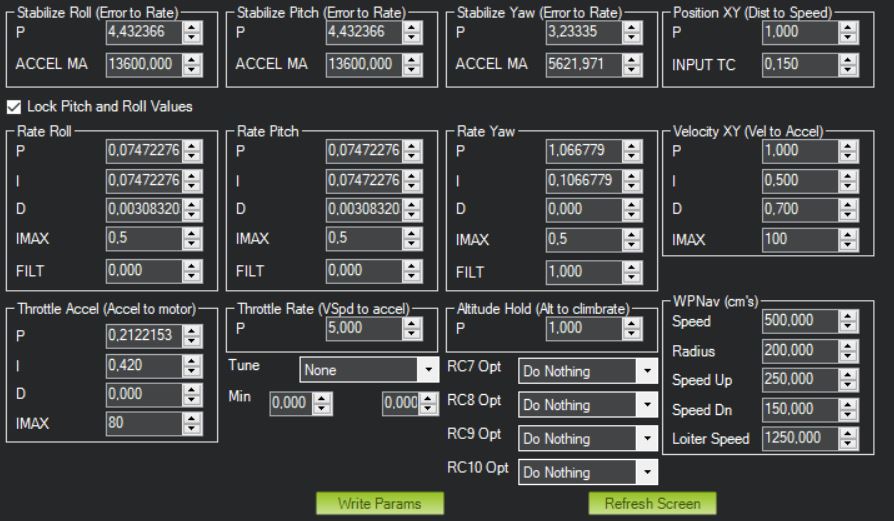
It flies really well in Stabalize and AltHold, it feels reactive and stable.
However, the Loiter flight mode gives us some worries. No toilet bowl effect, solid position hold but flies less stable. It’s like its stands on a pole on its center point. It is balance really well but unstable, He is wiggling all the time.
We have also a loss of altitude when performing a translation.
Other point, i don’t know how to identify the differents compasses, i use three at the moment but i can’t select the one in the GPS ship b/c i don’t know which one is it.
The goal is to have this compass as the primary to avoid current flow to interfere.
If any advices, please feel free.
Thanks.
Adrien
Today is a big day !
We made the final flight with mission and drops ! Successfull !
We received the build attestation and approval from civil aviation to fly the drone to 1000m with MTOW 25kgs !!!
Next week, we are working and contributing to save endemic birds on our island !
Tired but happy !
2 Likes
Erased