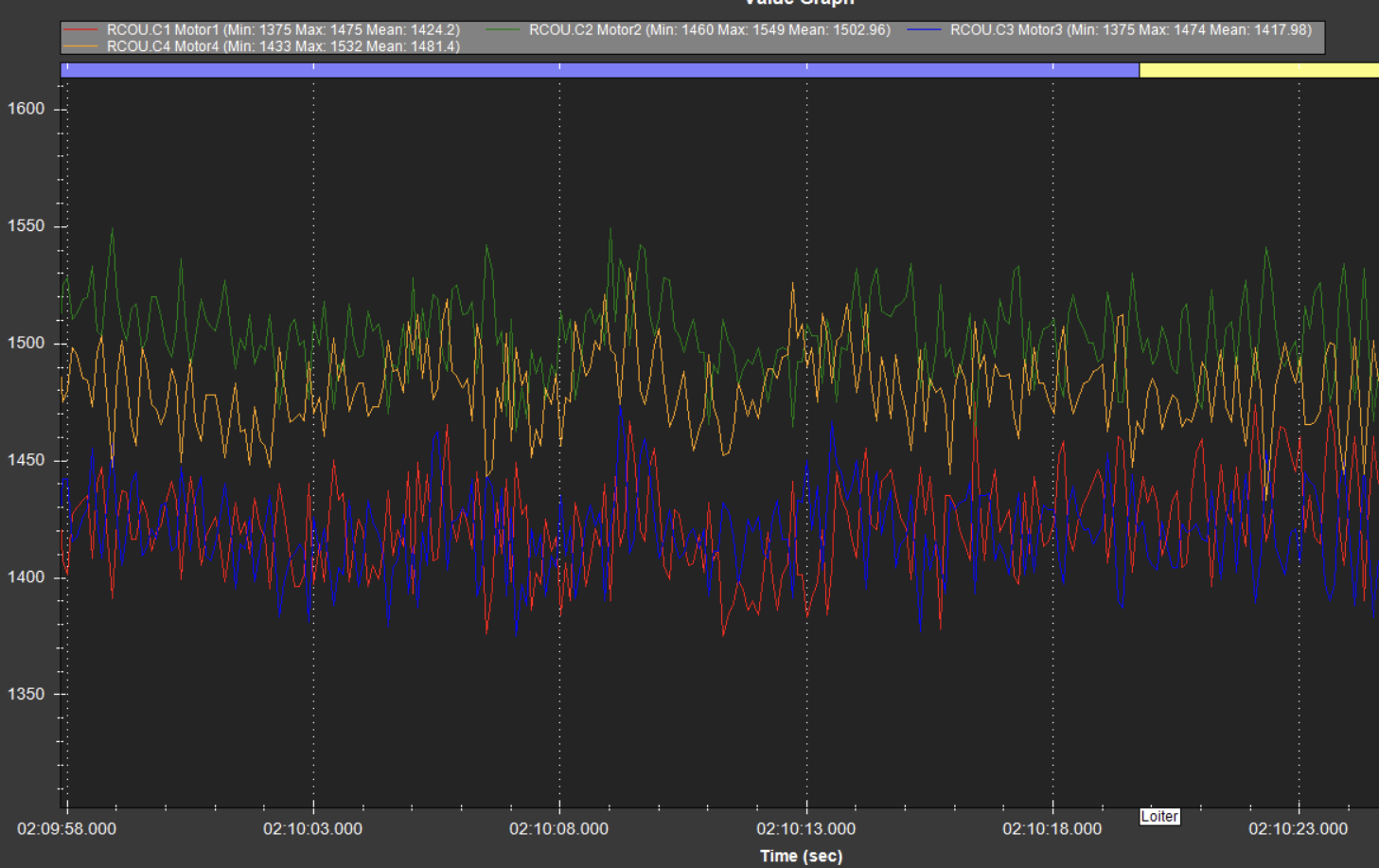
OK now we are making progress.
Now that all the oscillations in the motor outputs are mostly gone, we can see there is a distinct difference between motors 1 + 3, and motors 2 + 4.
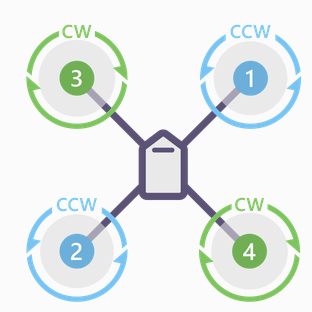
This means there is a significant weight shift to the rear making motors 2 and 4 work harder.
See if you can get this balanced better.
If there’s meant to be a payload like a camera, at the front and it is difficult to shift batteries, you may have to add some dummy payload there and make sure it is very secure.
It is detrimental to have a camera and gimbal fitted during tuning - we can compensate for that later.
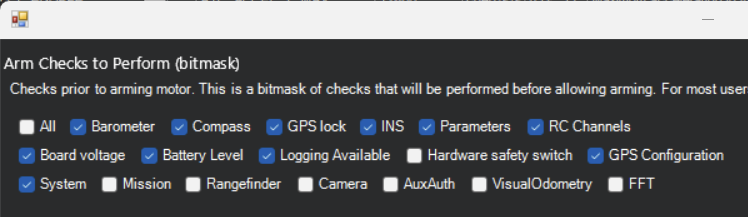
For Arming Check, if you need to deselect something like GPS for indoor test flights (for example) make sure you have at least these others selected
Selecting ALL and unselcting everything else is normal - and if a feature is not used, like FFT or VisualOdometry then it doesnt contribute to the arming check and is ignored.
Adjust these for the next tests (after you’ve adjusted that center of gravity/weight issue)
ARMING_CHECK,1
INS_HNTCH_BW,20
INS_HNTCH_FREQ,35
ATC_ANG_PIT_P,6.0
ATC_ANG_RLL_P,6.0
ATC_INPUT_TC,0.22
ATC_RAT_PIT_D,0.004
ATC_RAT_PIT_I,0.10
ATC_RAT_PIT_P,0.10
ATC_RAT_RLL_D,0.004
ATC_RAT_RLL_I,0.10
ATC_RAT_RLL_P,0.10
You’ll see I am asking for a slight decrease in the Angle P’s, and a slight increase in the Rate P & I s.
D terms are decreased a bit more just for good measure, since D was still over-reacting a little. At the moment these are just small changes, as bigger props and motors can be quite sensitive.
My reasoning is:
For larger movements the Angle P is over-reacting (too strong) and forcing the Rate P to work in the opposite direction to contain the movement. With Rate D damping that effect a little too much, this has limited the Rate P effect and allowed overshoot and some level of small instability.
Try another flight the same as before but take off in Stabilise mode first.
If there’s obvious oscillations then land immediately and reduce the Angle P’s even further
ATC_ANG_PIT_P,5.0
ATC_ANG_RLL_P,5.0