I have 2x Here3+ GNSS in blending mode with Orange cube+ (ADS-B) and Herelink HD video system.
They both failed, the pilot wanted to bring it back it altitude hold but couldn’t, saying his input did not reached the drone. The drone then turned in smart RTL which means land (no GPS) in that case and the drone finished in trees. I want to find why that happened to prevent it from happening again, so does anyone experienced the same kind of crash or have any clues as how it happened?
You might want to investigate getting a different voltage regulator for the flight controller (+5volts) since it is running at around 4.96v. And you are not logging current, which might be useful.
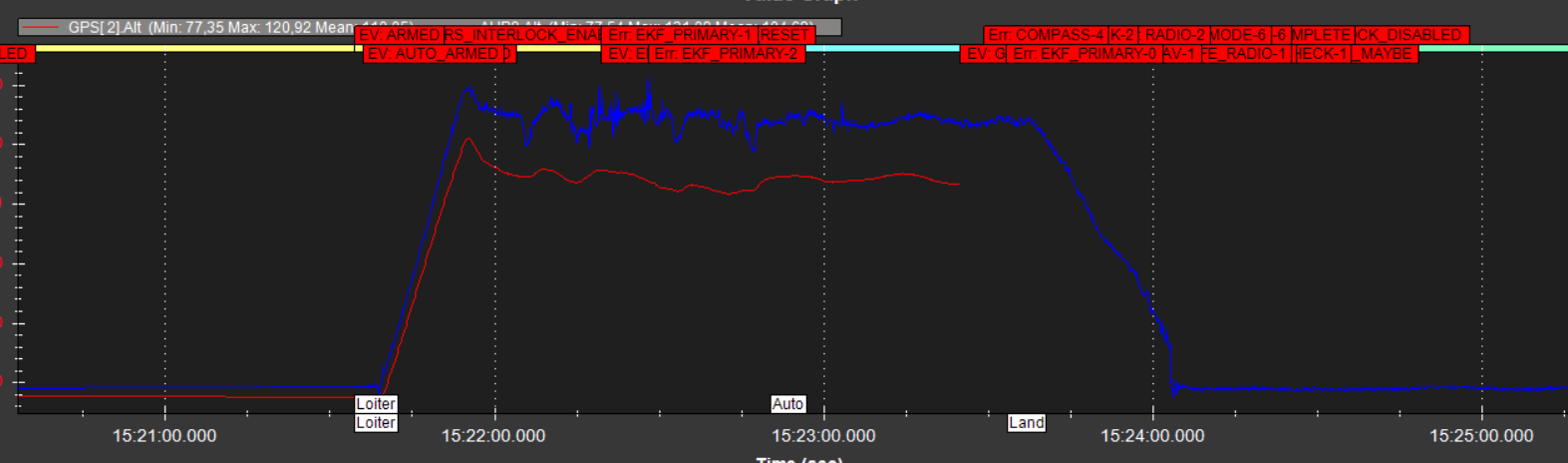
Both GNSS units stop reporting satellites and and associated data at exactly the same time, so it’s likely a power issue or something common to both.
Especially since the receiver seems to have lost power (or at least signal) at about the same time.
It appears there were attempts to switch to RTL but that is not possible while there’s no GPS.
Land mode was doing well until right at the end when something was struck - maybe a tree?
Stabilise mode would have worked to bring the copter home if the transmitter/receiver were in contact.
Hi Shawn, thank you so much for your finding, power issue makes a lot of sense. More reliable Power module and a backup would likely be the way to go then.
If anyone think of anything aside power that could affect both GPS and Radio please feel free to share, I don’t think of something else. KP index was stable and it would not result in loss of RC signal in my opinion.
The operation was in a forest and we’re happy how it reacted (radio failsafe turned into smart RTL) considering it had no GPS or radio signal, it’s better than a fly away.
It’s a drone that weight 25kg so it can draw a lot of amp, more than any power module we found so we skipped current sensing. For this setup we used (https://holybro.com/products/pm02-v3-12s-power-module), it worked for hundreds of flights but we exceed its current sensing limit of 120A.
Thank you I will look into Mauch models, since PM02 worked for hundreds of flights, using it as a backup with Mauch should result as a reliable power source.
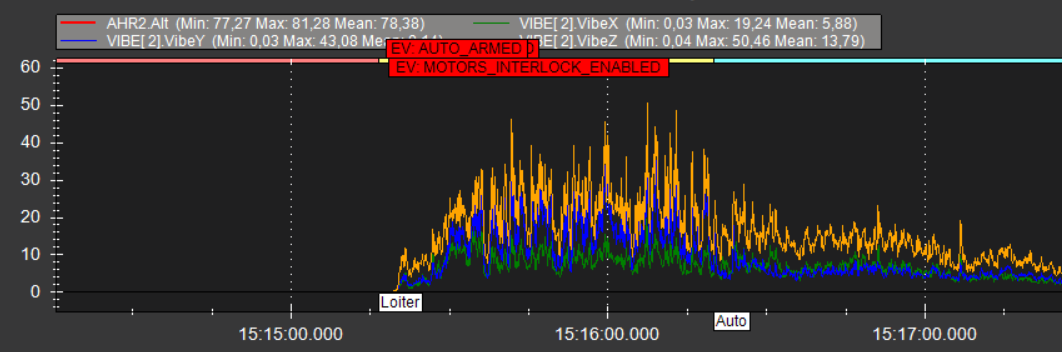
Quick question, would you say vibrations are acceptable before the crash? Since I’m working on the drone design I wanted to know if my damping is sufficient, here’s a screen shot of the FC vibration levels on a normal flight:
I don’t use the current sensor, since my normal current usage is higher than the PM02 current sensing capabilities. Seems like electronic works fine after the crash. The board voltage is still around 4,96V but it always has been.
I understand you didnt use the current sensor, but I am wondering if you had all your main current running through it.
As for the notch filter, I would, and I always do. A nicely optimized notch filter can remove a lot of the noise from the control feedback signals. That may be a little technical sounding, But in short, the notch filter helps the craft run more smoothly.
As for current, it doesn’t pass through the power module but through the drone power distribution board directly. The PM02 input is connected on this power distribution board and its only ouput is to the cube.
I don’t see or smell anything bad from it when powering it up, might be wise to change it though since it’s cheap.
Fix vibration at the source… don’t filter or isolate unless they are your only options.
Vibration is real data… isolating it or filtering it out is a bandaid, fixing the symptoms is not fixing the problem.
All frames have vibrations etc, but do your best first, and don’t over do the notch filters… it can induce phase lag and cause more problems than it solves if used incorrectly.
Our standard power brick will do 120A momentarily… we rate it at 30A because it will reliably do 30A all day every day.
Our competitors power modules often don’t actually outperform even though they mark them by their “ maximum” capacity rather than the continuous load capacity… so be careful on this.
Thank you I will be careful with the filter, might try that as well: ProfiCNC/Hex CubePilot Anti Vibration Mount (Pixhawk 2) by GuyMcCaldin - Thingiverse
.
I used the PM02 from holybro which sent 4.96V to the cube, I will try redundancy with the Mauch PL 4-14S HYB-BEC / 2x 5.3V. I run on 12S so I can’t use the power brick mini that comes with the cube.