Im unable to tune a quad, pls find the logs setup is t motor and 22 inch prop
pls let me know if you need any other details
as im observing when ever i tried to tune there will be little wobble in both pitch and roll as well and keeps amplifying and eventually loses the control from pilot and need to recover from stab mode which some times and some times not
Exactly which motors and ESCs?
Exactly what battery pack?
Set these and do another short test flight, mostly just hover, but you can do some basic pitch, roll and yaw. Altitude changes help too, just dont go crazy, and no need to run a mission.
These will put a few aspects of the copter back to a known-good or normal start, given the size of this copter. Some of these parameters may not be in their final state, but will help us gather the required information.
Thank you for your reply. I apologize for seeing your message late. I am sharing additional details about the system and the issue we are experiencing. I would greatly appreciate your help in reviewing the logs and providing your insights.
System Details:
Motor-to-motor distance: Approximately 860–875 mm
Motors: T-Motor 320KV Anti-Gravity
ESC: T-Motor Flame 60A
Battery: GenX 6S 30Ah
AUW: Approximately 8 kg
Propeller: 22x6.6 T-motor propeller
Currently, the system is able to fly after addressing some critical parameters. However, the issue still requires further investigation.
Earlier, the CG was slightly off, but we have now corrected it. I have attached the flight logs along with a video showing the earlier issue for your reference.
Observed Behavior:
Most of the time, when I release the stick after applying full deflection on roll right and pitch forward, the system bounces/oscillates. This behavior is noticeably stronger compared to roll left and pitch backward, where the response appears more stable.
Could you please review the attached logs and share your suggestions on what might be causing this behavior and how we can resolve it?
I have uploaded of 6th & 7th Mrach flight logs and 4th march instable flight video for your best reference possible for issue finding
I would truly appreciate your guidance on this. I am eagerly looking forward to your feedback.
Go back to all the things that I posted already and set them, I couldnt see a log where you had done that.
In addition set these for the T-Motor Flame ESCs:
EDIT: you could also try doing the semi-auto ESC calibration since the new Flame ESCs supposedly allow that, and the old Flames had a fixed PWM range that could not be calibrated.
There is no need for all the extra logging or any notch filter, so that is good.
Do two test flights in ALTHOLD mode, the first one after the above changes - just ascents and descents.
Then set: MOT_THST_EXPO,0.4
and repeat the test flight.
What we are looking for is:
set too high you can see instability at low throttle (descent)
set too low you can see instability at high throttle (ascent)
Keep in mind there is almost always some instability during vertical descent, so choose a safe descent rate. If you think you need to raise the thrust expo because of instability on ascent, go to 0.6 and do another test.
This will help determine if the thrust expo is correct before you get to Autotune.
Send that log
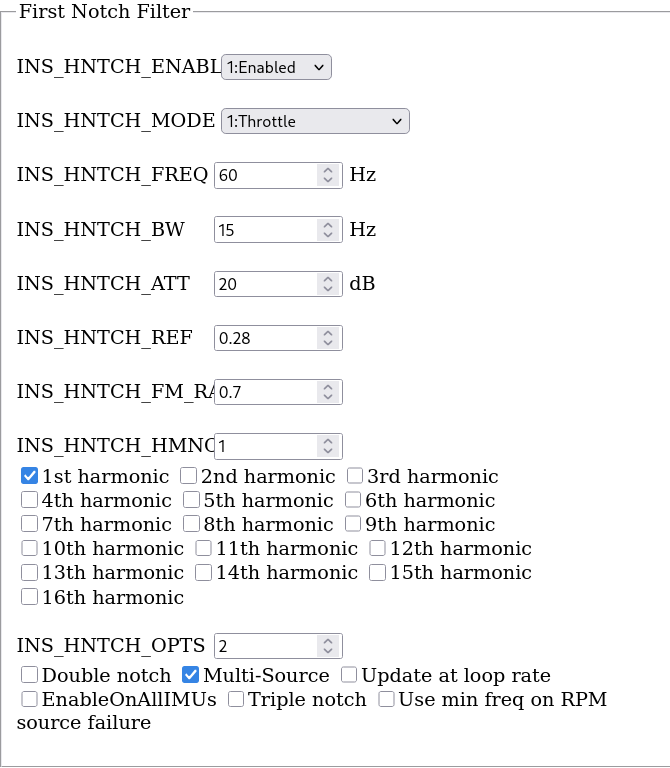
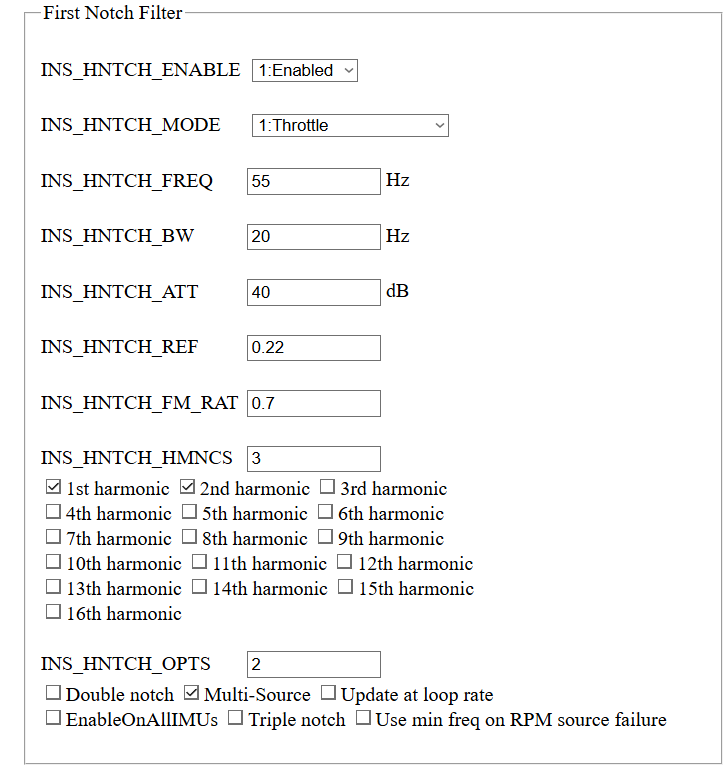
If for some reason you really want to run a harmonic notch filter use these settings pictured below, however I think it will cause more instability than it solves in your case.
The only real advantage I can think of is: if you add a payload and it enhances vibration well above current levels.
Unfortunately we are already flying with actual payload and AUW is 8Kgs only as well in last few flight we used filter at 70 hz where as still we see noise in the logs
And we are unable to reduce the noise such as over the time noise frequency keep on increasing or developing in the frame itself to be honest dont know!
I never know where it is going to lead and one more am I at the right direction to solve the persisting issue.
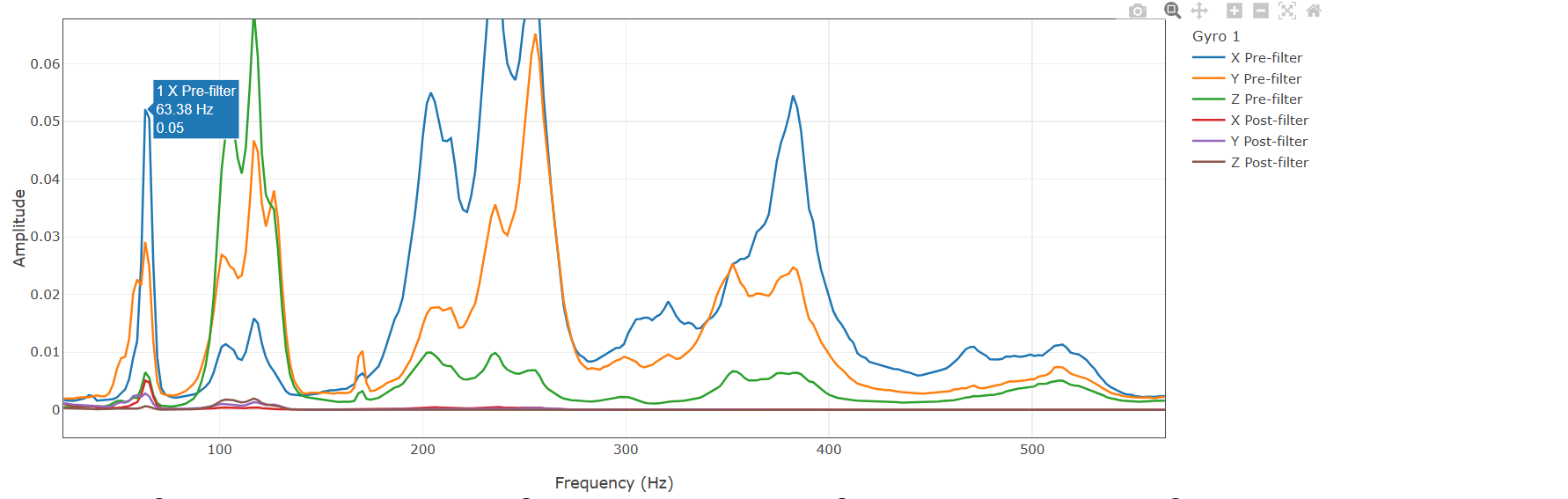
No, in your case the post-filter noise is almost nothing.
The values I provided will fix this, although the post-filter noise from the primary peak is still almost negligable and not worth worrying about.
You could always do anything you want, but an FFT-based notch filter will be broad and overly aggressive, like hitting a thumb-tac with a 10-tonne hammer.
Always fall back to checking the post-filter noise, that’s what matters. You can see it’s practically a flat line across the bottom of the graph. Any bumps are below -50db so not worth introducing other issues to fix them.
Focus on the next steps I gave and dont worry about something that is not a real problem.
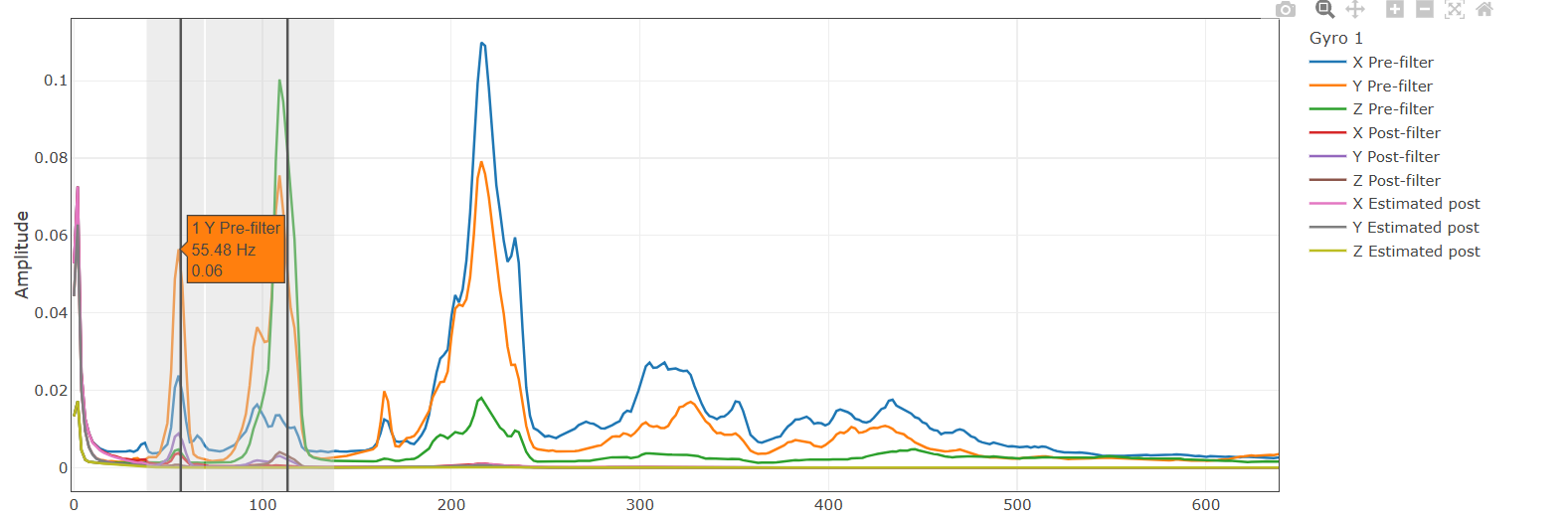
As per your previous recommendation i have performed flight , there is a small update. This test was conducted using the same drone, but the flight was performed without the camera installed.
I observed a slight shift in the notch filter frequency from 60 Hz to around 55 Hz.
This can happen when MOT_SPIN_ARM and MOT_SPIN_MIN are not set correctly. These are affected by changing the thrust expo, and conversely they can affect the thrust expo.
I maintain that you DO NOT even need a harmonic notch filter, or MAYBE with the settings I provided with the adjusted lower frequency. The post-filter noise (after INS_GYRO_FILTER) is already so low that having any harmonic notch filter introduces other issues like phase lag that will affect subsequent tuning.
Based on your observations, set the thrust expo to 0.5 (which is roughly what we expect from Flame ESCs) disable the harmonic notch filter and TEST that MOT_SPIN_ARM is low as you can get it and motors still start up reliably. Add about 0.03 to get MOT_SPIN_MIN
Now go and run Autotune on pitch and roll axis.
EDIT: a brief look at the logs says your observation of thrust expo 0.5 is most likely correct.
I performed AutoTune with the following parameter changes:
MOT_THST_EXPO = 0.55
INS_HNTCH_ENABLE = 0
Regarding MOT_SPIN_ARM and MOT_SPIN_MIN, I conducted a motor test and observed that all motors begin rotating at approximately 6% throttle. Based on this observation, I set the parameters as follows:
Pitch and roll look quite good now. The resulting PIDs and accel values all look very expected and normal for this copter, so I expect noise and vibration has not been a problem.
Yaw is a bit out of control so run a yaw Autotune: AUTOTUNE_AXES,12
Even though noise is not getting past the gyro filter, there is significant vibrations with a small amount of clipping events. Try to find anything loose or touching the flight controller and secure it. Wiring connected to the FC should not be pulled tight, allow enough freedom that the wires dont transfer vibrations, but not so loose they flap around all over.
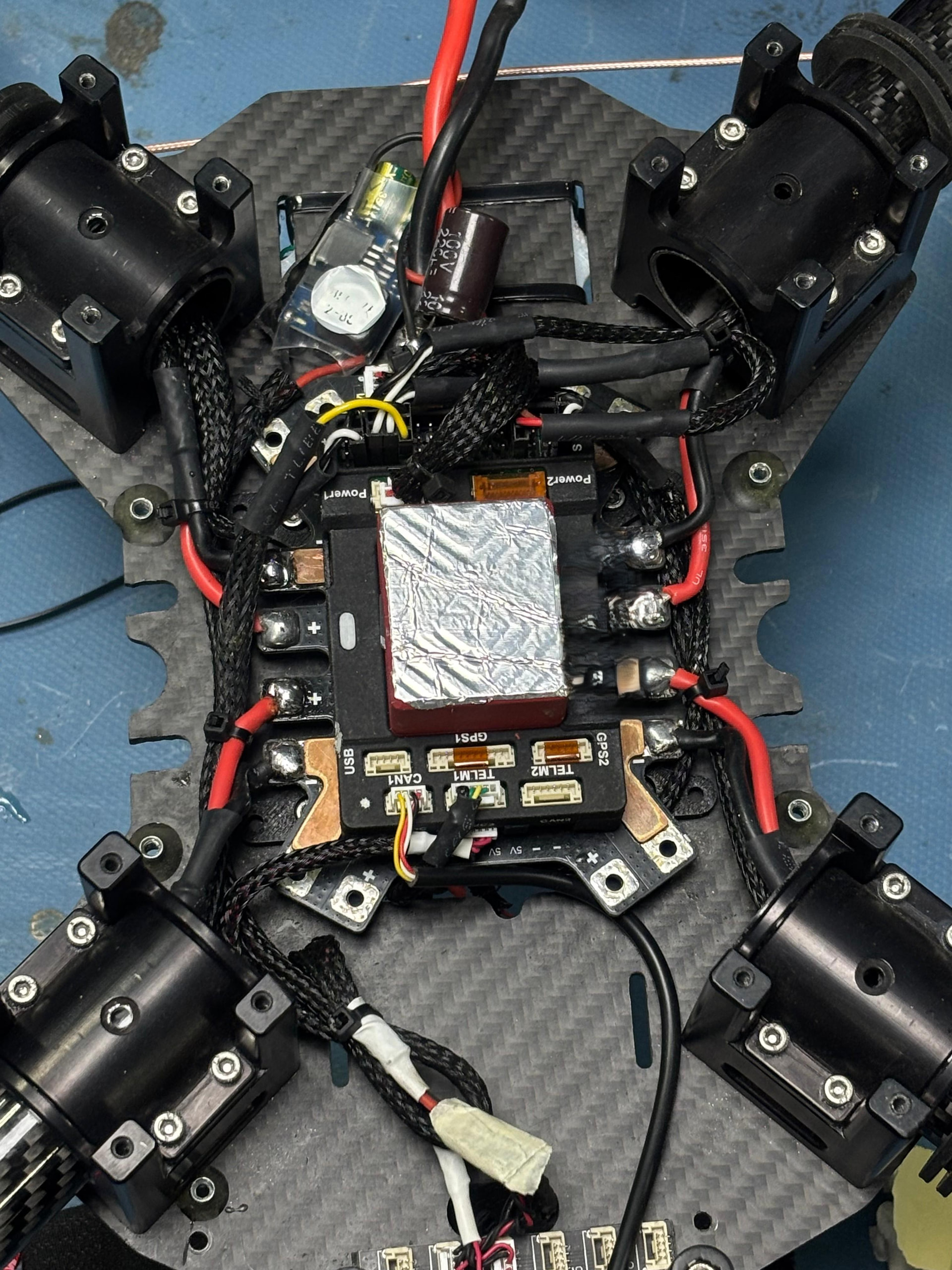
Maybe send a photo of the flight controller and wiring.
I do not see any moving parts in the flight controller assembly. The flight controller (FC) is directly screwed on top of the PDB. Please refer to the attached image.
I performed AutoTune for yaw, and post-tuning, the yaw tracking appears accurate and stable.
In the subsequent flight, I executed an Auto mission for 3 km. While flying outbound, the performance was normal. However, during the return leg, at approximately 1 km from the home point, the drone began to oscillate aggressively, which ultimately led to a crash.
Could you please help analyze and identify the possible cause of this crash?
Good news
Attitude control is great - everything we did worked. Right up until the crash
Bad news
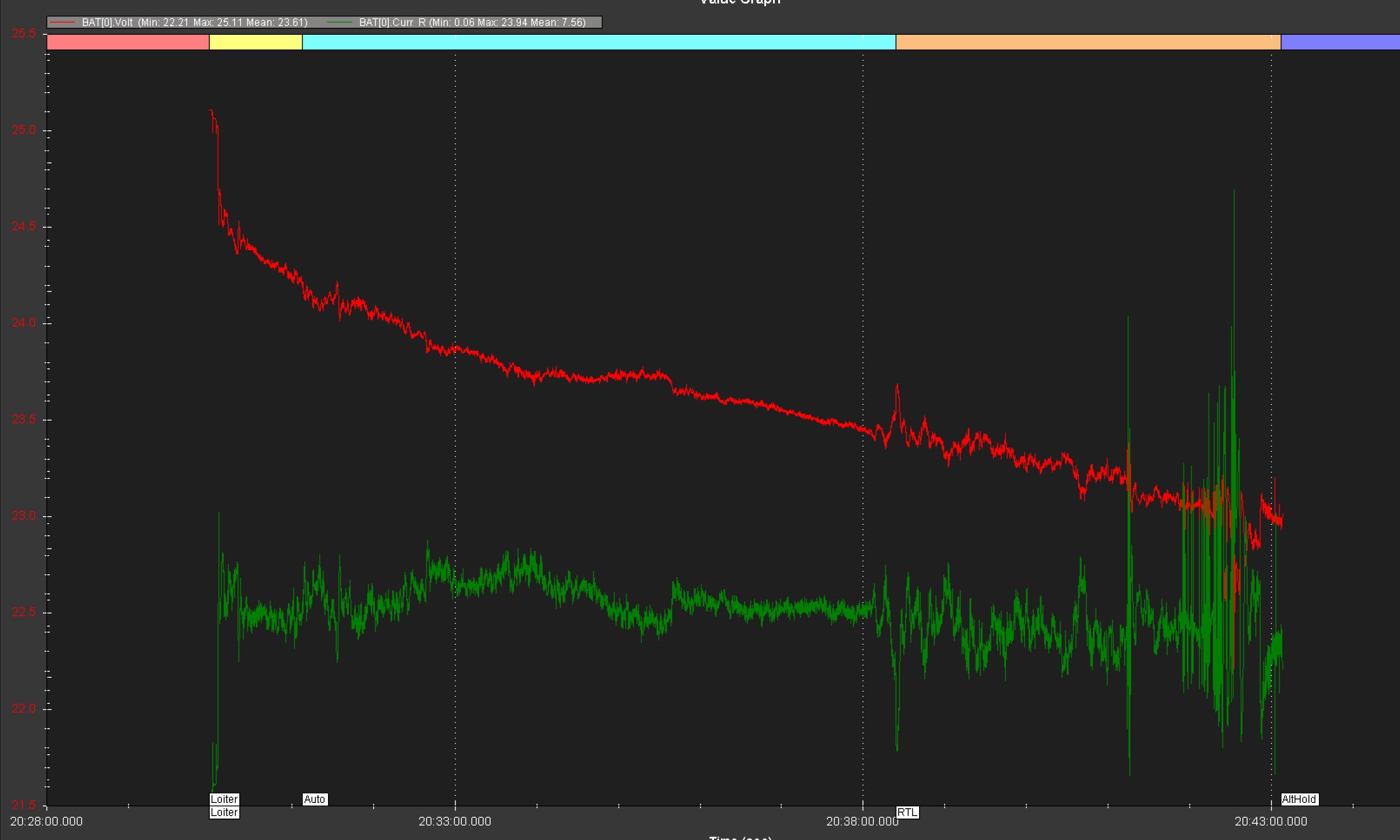
Just looking at battery voltage and current we can see the outward bound journey is smooth, probably with the wind. The return journey is tougher, probably because of wind. There is one noticeable spike in current, then a short time later the trouble starts.
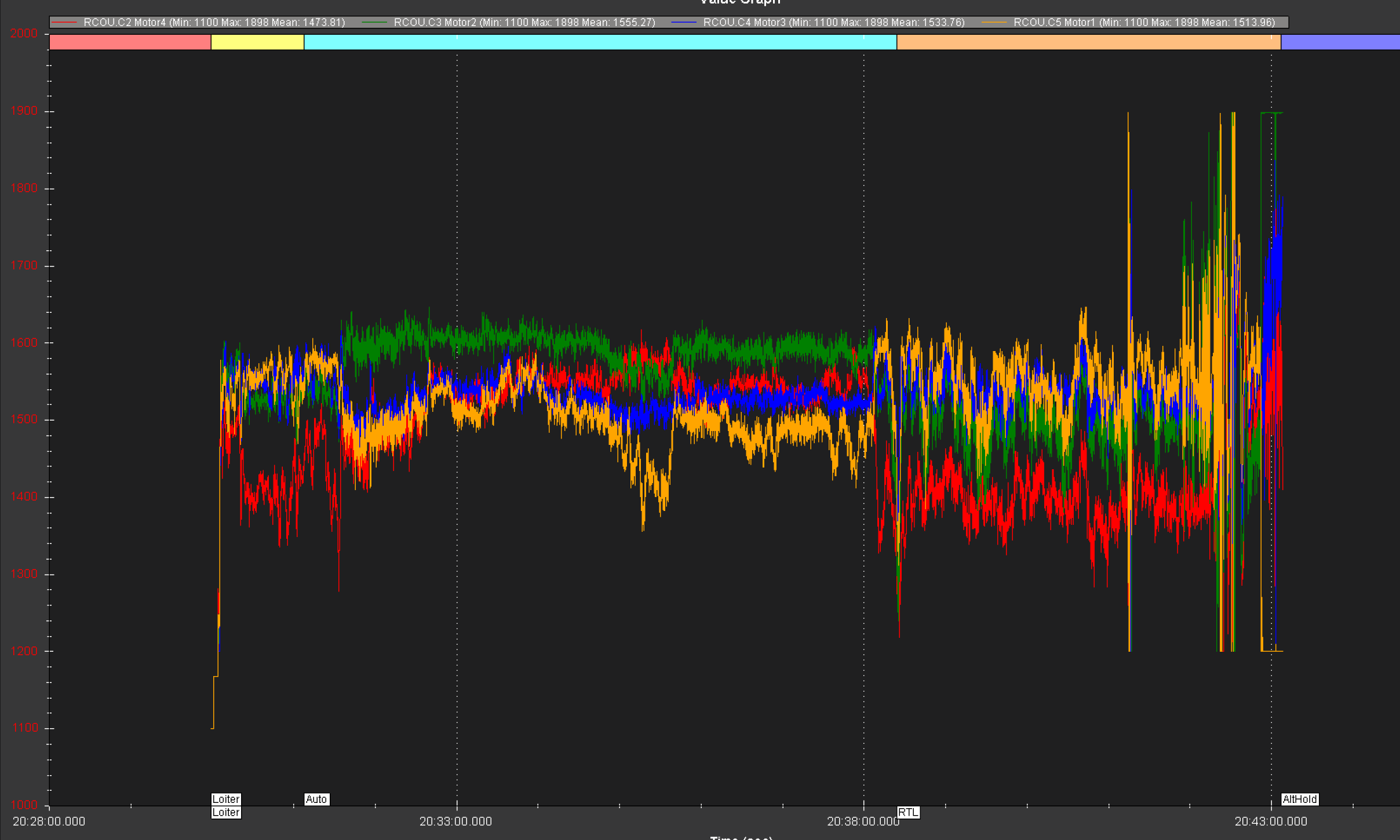
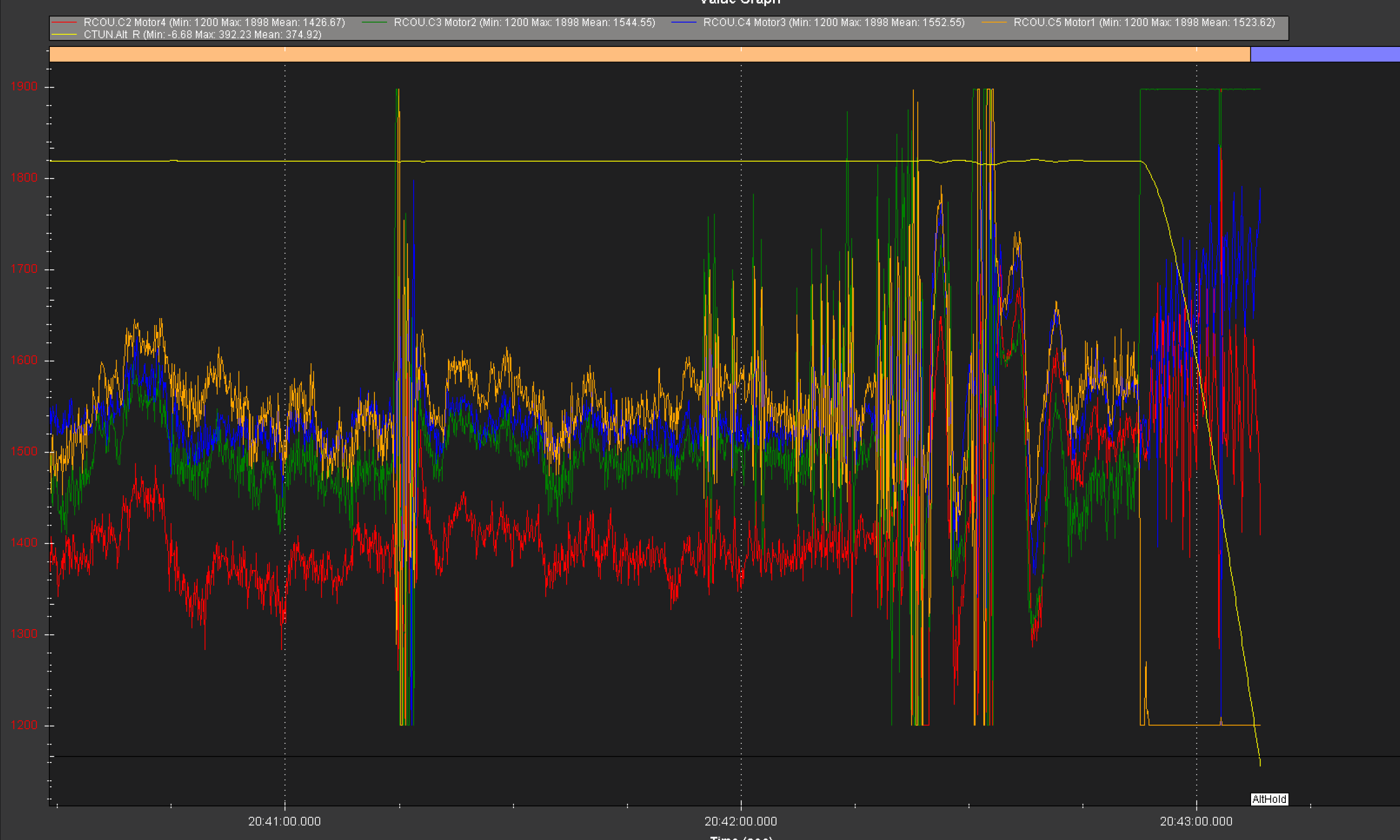
Looking closer at the motor outputs (and altitude) we can see Motor2 and Motor1 were involved in all the incidents. The copter struggles through and Motors2 and 1 recover and continue working until finally Motor2 stops providing any thrust and is commanded to maximum, Motor1 is commanded to minimum to compensate - being a quad there is no redundancy and the copter goes down.
When those motor outputs are commanded to maximum, that means the motor or prop or ESC has stopped providing thrust. If it was just one motor you might expect a motor mounting screw touching one of the motor windings causing a short or something like that. When it’s two motors/ESCs playing up at exactly the same time you’ve got to look to the common elements, like the brand and model of ESC for example. Or is there power wiring common to just those two ESCs?
There may have been some COG shift away from Motor4, or it could have been an effect of wind, I’m unsure. Either way it’s not a big issue and the copter could cope with that fine.
The cause of the crash is not motor saturation because of a slight COG shift or anything similar. I believe it’s because of ESCs not able to cope with conditions and potentially desyncing, and in the end not recovering.
Post pervious crash, I have made the following changes:
Relocated the ESCs from below the motors to inside the frame to reduce the length of the power and signal cables.
Following this modification, I conducted flight tests:
Flight 1: Performed a manual flight in Loiter mode – no issues were observed.
Flight 2: Executed an Auto mission in a rectangular pattern – after approximately 10 minutes of flight, an unusual noise was observed from the motors. This was followed by aggressive oscillations. Fortunately, the drone was recovered safely.
Based on this, it appears that reducing the power and signal wire length did not resolve the issue.