I’m building a heli with the gps located at the tail, good point about considering the placement relative to moving blades…
By the included splitter, you refer to the i2c splitter?
I’m building a heli with the gps located at the tail, good point about considering the placement relative to moving blades…
By the included splitter, you refer to the i2c splitter?
Yes it’s either can or i2c which ever one you designate it to be
that’s my intention, too. With CAN it is finally possible to build the GPS Puck at the end of the tail on a big heli too.
First bench tests with here2:
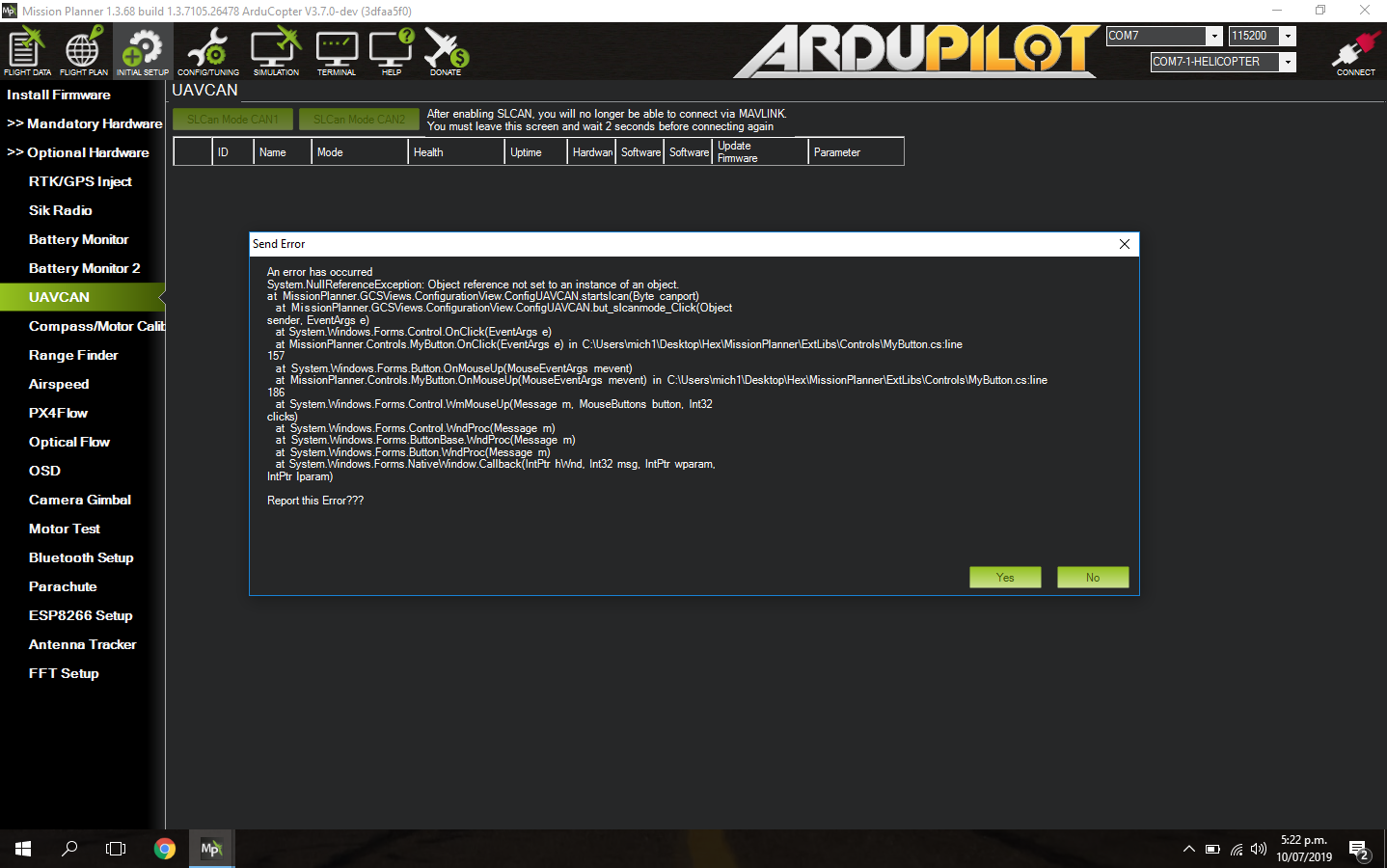
with latest 3.7-dev NUTTX : can detect gps at boot, but cannot open UAVCAN dialog in MP, stucks on the SLCan button
with latest 3.7-dev CHIBI: connects at boot and can open UAVCAN menu with FW upgrade etc.
since i’m still using nuttx because chibi is still too untested for certain application, i wonder if it’s a nuttx limitation or it can be fixed…
Nuttx has been removed from 3.7 dev. Did you add it back in. On your branch?
Also slcan was added after the removal of nuttx
No new features exist in Nuttx…
The safety features don’t exist in Nuttx…
It’s dangerous to fly Nuttx…
Are fix/fix2 UAVCAN messages supported yet on CAN bus for Here2?
Are barometer corrections for altitude being added to fix/fix2 UAVCAN messages such that Here2 can be used for accurate lat/long/alt measurements separate from a FC?
Are CAN devices connected to the Cube CAN port getting corrected EKF data or the raw data from the connected CAN Here2?
Our intentions are to use Here2 as replacement for Zubax GNSS2 as separate GNSS receiver for our camera payloads, as well as together with Cube FC platforms with Here2 as only GNSS being used.
Hi,
I just tried to setup the here2 using can but it doesn’t seem to work. Mission planner reports “no GPS”
I’m on the latest master (3.7-DEV) and using missionplanner xxx.66 version. I do get the gps when I go to UAVCAN/SL1 but it’s reported as “maintenance mode”. I can’t upgrade (no update available reported) nor change the Baro parameter (no parameters shown when I go to parameters/refresh).
Also I did set the GPS_TYPE as 9 and the CAN parameters. (also led’s parameters, but they only flash blue like no data)
Did I miss something?
thanks
It needs the firmware added…
Go back to step one
Fix messages are supported and outputs the estimates from the GNSS receiver only. The pressure sensor outputs pressure and temperature in separate messages, they are not rolled in to the Fix message.
The Fix2 message is not currently supported.
i have and update the Here2 gps
it does not say anything about 3.9.8 plane
as i cant get the GPS side to work on can-bus the led’s work baro works the compass just not the gps
hi i am trying to connect to slcan but no luck, once i click nothing happens. before i was able to connect but now nothing happens. lights on gps are solid green. help
problem solved. it is not working if i use usb cable only. when i connect battery and try again it works. 4 hours wasted to find out ![]()
That would indicate your USB voltage is low
Which firmware do you talk about… I’ve followed the step from what I can see…
I tried to get it work, some configuration except MP that was at 1.3.68, it seems that this prevented everything to work ( usual problem about can bus detection of GPs)
MP Downgraded to 1.3.64: everything works.
Thanks
Daniele
I have more than 3 days of trying to make the gps of my cube work, but I have not succeeded, I tried everything.
I have installed the version of MP 1.3.64, I have installed the version copter 3.7 cube black, but it does not detect the gps.
I have tried in diffrent 3 pc , also I have tried with the last version of the MP, I have tested with different compilations of copter 3.7, but nothing works for me.
I have verified that the value of FRAME_CLASS is different from 0.
when I use the latest version of the mp nothing happens, but when I use the 1.3.64 version of mp I get the following screenshot.
I have not managed to work with the i2c protocol and the 8-wire cable.
I am always careful to change the internal position switch when I change the cable. I always use the cube black versions.
I tried with the power module installed or only powered the cube by usb.
when I turn on the pixhawk the led of the gps light only at the firts seconds and then they do not light anymore, it does not matter if I connect it by canbus 4 wires or by i2c 8 wires the only difference is that when I connect it by the 8-wire cable it also turns on the red led of the switch but only in te first seconds.
Will my unit have a hardware problem?
I hope someone can help me.
Thank you