Best to do a compare parameter, as you should only load the different ones you “need”
check the following parameters.
Compass_typemask 63487
NTF_LED_TYPES=39
Gps type 9
.
Best to do a compare parameter, as you should only load the different ones you “need”
check the following parameters.
Compass_typemask 63487
NTF_LED_TYPES=39
Gps type 9
.
My here2 also came configured as CAN.
Initially it was not recognized, i guess just because of the CAN id setting.
Anyways, in the course of setting it up correctly, I also updated bootloader and firmware, since an update is recommended everywhere.
What supprised me is that after the update according to the instruction i had lower version numbers.
Before update V1.3:
Everything seems to work fine now, im just wondering if there is a more up to date firmware that could/should be used.
That isn’t right. It should be 1.3. I thought I had changed it on the server, but maybe not. I will check on it tomorrow.
However, if you are just using it on CAN I don’t think there are any functional changes.
Philip
Thanks for your help. I finally have the CAN GPS recognized and showing on MP, but I don’t seem to be able to get the compass set up. Here are the logs. Do you see anything obvious? The CAN issue has really set this project behind.
Phil
Ardupilot puts CAN last on compasses
Philip
I cannot get past “Bad AHRS”
I have lost several days trying to get the Here 2 that was supplied with my last Cube purchase working. I have chased all over multiple blogs and instruction pages for scattered bits and pieces for what should be almost plug and play.
I expect to sweat for the prize, but this is getting ridiculous.
I was very impressed with the way you handled the IMU problem that required returning my first Cube purchase. After that I was very pleased with its performance. Your honesty and transparency in dealing with it has made me a forever (?) customer.
What I need is a single definitive source for parameter settings that actually cause the Here2 to work.
I appreciate the move to CAN Buss, and I am committed to seeing it through, but I need to get this craft in the air.
Phil
Log File C:\Users\Phil’s Dell\AppData\Local\Temp\tmpC3FA.tmp.log
Size (kb) 7743.7568359375
No of lines 96876
Duration 0:03:32
Vehicletype ArduCopter
Firmware Version V3.7.0-dev
Firmware Hash c445362f
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = WARN - WARN: Large compass offset params (X:87.00, Y:-152.00, Z:295.00)
No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = FAIL - ERR found: COMPASS
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.38, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = UNKNOWN -
Test: NaNs = FAIL - Found NaN in POS.RelOriginAlt
Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Does this indicate a hardware failure in the Here2?
AK09916: Unable to get bus semaphore
AK09916: Reset Failed
full report:
Frame: QUAD
CubeBlack 00230030 32385108 32373737
ChibiOS: b96e5437
ArduCopter V3.7.0-dev (c445362f)
EKF2 IMU2 origin set
EKF2 IMU1 origin set
EKF2 IMU0 origin set
EKF2 IMU1 tilt alignment complete
EKF2 IMU0 tilt alignment complete
EKF2 IMU2 tilt alignment complete
GPS 1: specified as UAVCAN
Barometer 3 calibration complete
Barometer 2 calibration complete
Barometer 1 calibration complete
Calibrating barometer
AK09916: Unable to get bus semaphore
AK09916: Reset Failed
I have set COMPASS_TYPEMASK == 0
Exactly what should it be, I have seen several suggestions.
For the time being, I am abandoning efforts to bring up Here 2 on CAN. I have taken an older Here 2 off of another aircraft and set it up on the craft that I must fly soon. I will be watching this effort for coherent documentation. I have reached the conclusion that CubePilot anticipated the firmware work would be further along when the CAN configured product reached customer’s hands. Having been an electronic product manufacturer myself, I can fully understand that decision. It is really difficult to anticipate where all of the moving parts of an effort will meet. What I hope that CubePilot will do is to try and gather full documentation and parameter suggestions (with detailed explanations) to:
I think this community is conditioned to tolerate terse product instructions in microprint on the back of a playing card, but we should demand more. The configuration of things like Here2 and the Cube are potentially life and death issues, and they should be thoroughly and carefully documented - not left to scattered blogs.
I understand that the current implementation of CAN in Ardupilot is not straightforward, The ardupilot team are working to not only make this much more straightforward, but to make things easier and safer than ever before.
with the compass mask, in mission planner, just leave CAN showing.
Can try 63487 for the value of COMPASS_TYPEMASK. That should set all of the bits except the one for UAVCAN.
Thanks,
I will be moving my CAN Here2 to my research craft with less pressure to get airborne. I am looking forward to better understanding Arducopter. I have been employed in electronics since 1963, and self employed since 1984. I have designed many micro-controller systems and boards, but just started with Arducopter last December. It has been a steep climb, but I am beginning to get comfortable with it. I really do appreciate this community, and I hope to make some small contribution.
Phil
That got the compass working, Thanks!
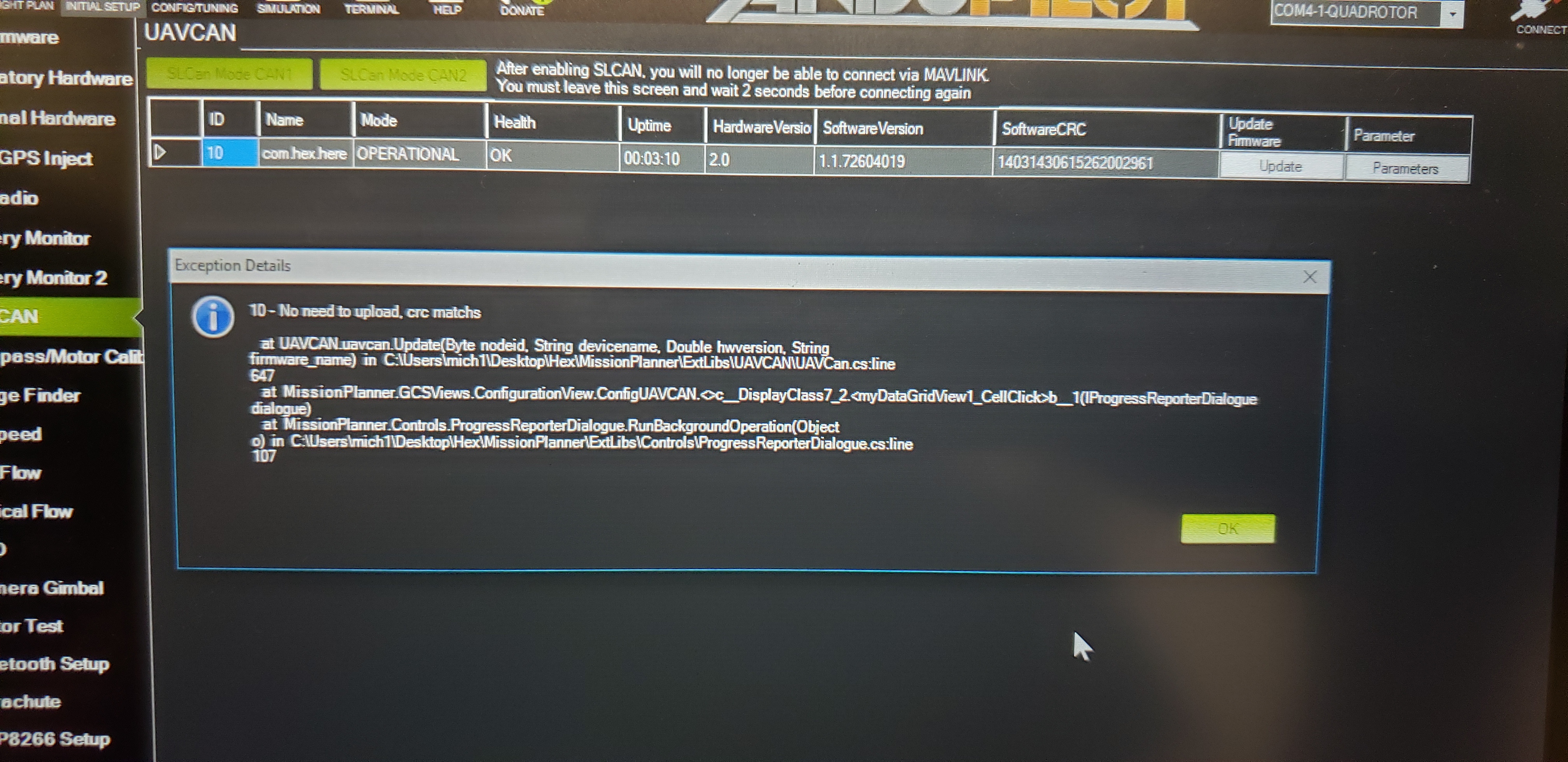
I purchased several Here GPS modules V1 and have used them all without any problem via I2C with ArduCopter and ArduPlane via PixRacer. I recently purchased a V2 (Default I2C) and then V2.1 (Default CAN) and this is where my experience has gone down hill. I finally found this forum and was able to use a pixracer loaded with the correct version of ArduCopter to update the V2.1 and then get it going on I2C to remove the GPS config check issue in ArduPlane. I tried to implement CAN but like has been stated Ardupilot is a ways from making this implementation work well and I already wired out for UART and I2C and also want to use the onboard switch. The problem I am now facing is that after finally getting the V2.1 Here2 working I decided to upgrade the V2 which did not upgrade to the latest version of 1.3. It upgraded to a lower version 1.1 (not sure exaclty) and now I have the same GPS config check issues on the V2. I tried to upgrade again but msision planner gives an error stating no need to upgrade. Is version 1.3 available for hardware version 2 and is there a download link I can get to manuall upload the new version that hopefully fixes this issue?
Welcome to the forum!
We do apologise that the transition has not been smooth.
If you update to latest beta on mission planner, that should help.
I will tag @Michael_Oborne just in case.
Thanks I will give this a try…
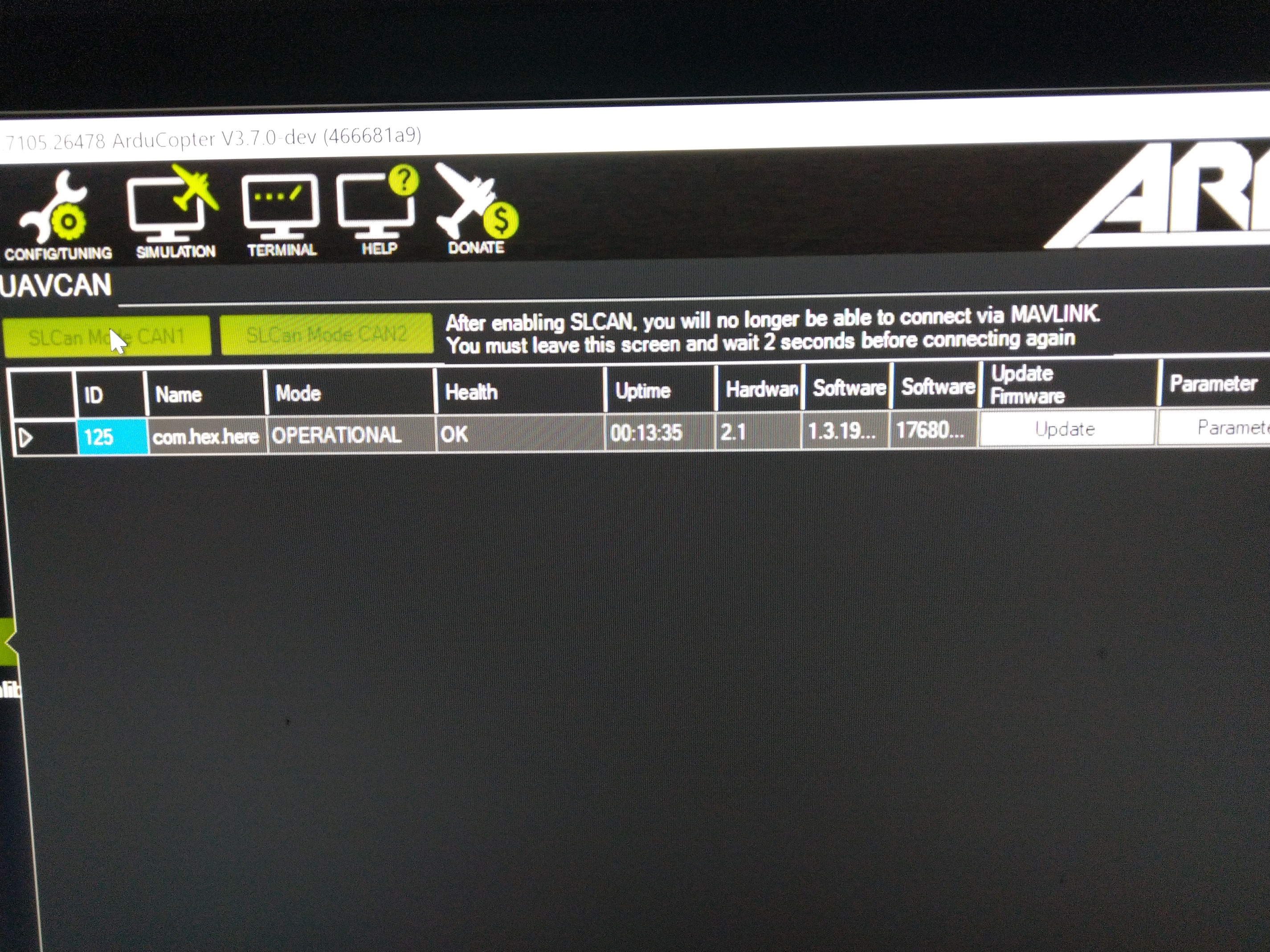
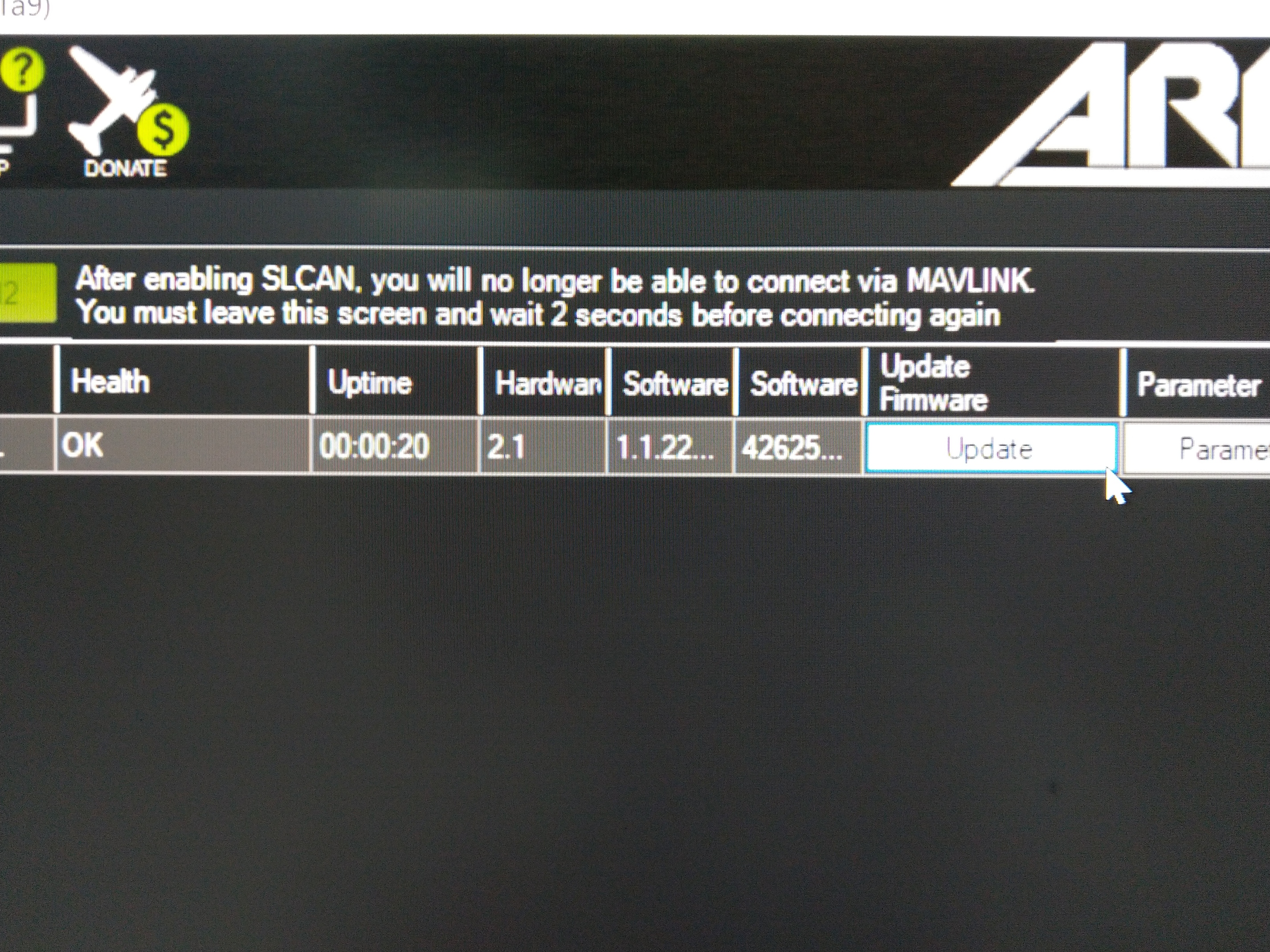
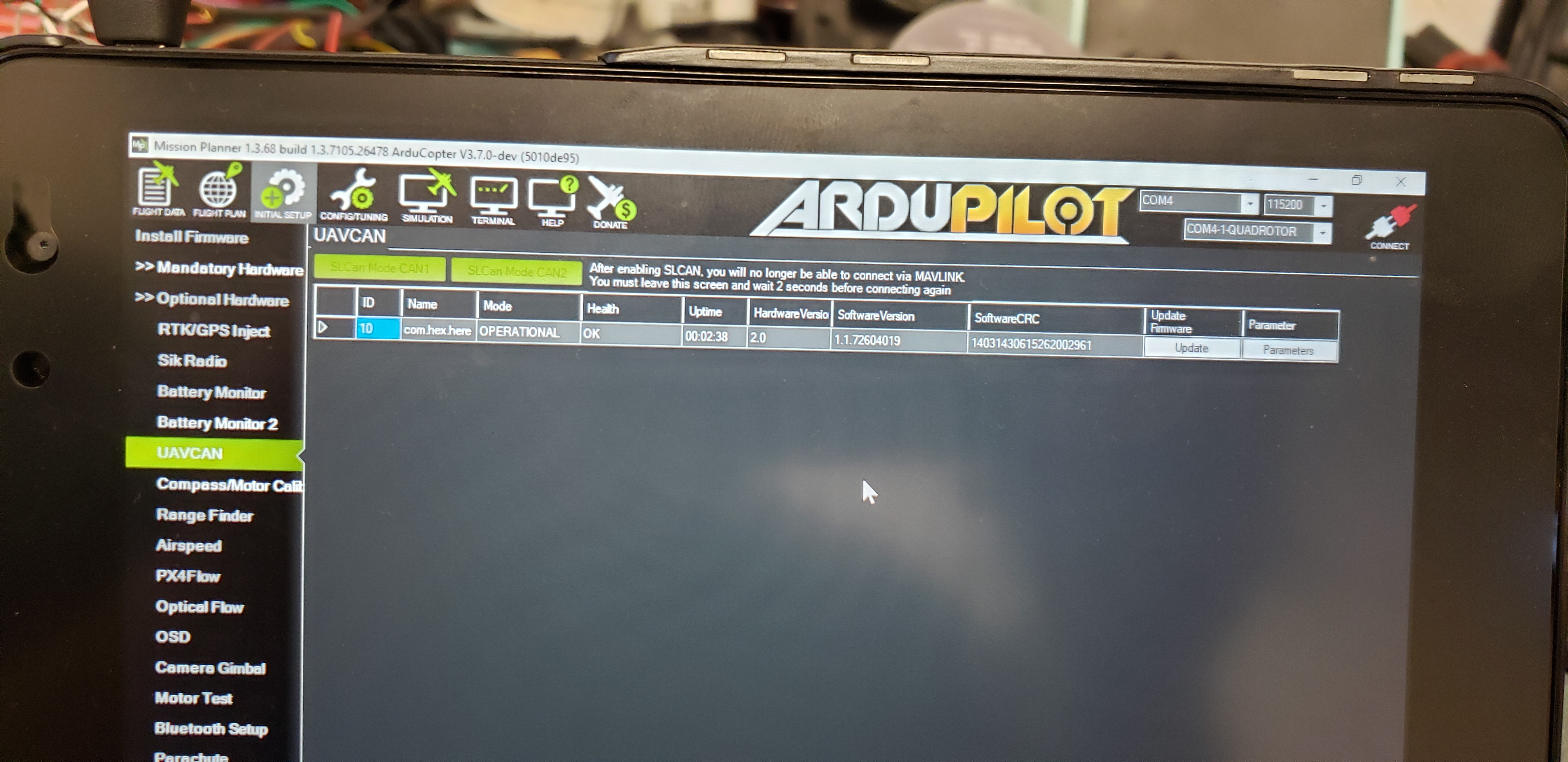
can you post a screenshot of the uavcan config page? i want to see the name and the hw version id’s
@Michael_Oborne - any updates on getting a firmware version that will work the Here V2 to overcome GPS config check error?