thanks for the screenshot.
please try again now. i have updated the firmware file on the server to the correct one.
thanks for the screenshot.
please try again now. i have updated the firmware file on the server to the correct one.
That did it. Thanks for all your help.
Awesome!
The original Here2 was reporting as a different version, hence the confusion, sorry about that
I will gladly post in the Solo section but while I’m here… I have a Here V2, it was set to i2c from the factory. I’ve got the switch set to can. My yellow wire to CANL1 , white to CANH1, ground, 5v+. Mission Planner is updated to 1.3.68, master Dev 3.7 loaded to cube. Param CAN_P1_Driver set to 1. When I click SLCan Mode CAN1 or 2 for that matter. Nothing happens. It disconnects. I can’t see the Here GPS. Any thoughts?
On a solo? How is it wired at the Solo end?
Hi all.
I have Mission Planner 1.3.68 and a Cube with Arduplane 3.9.10.
I have a Here2 that come in I2c mode, so I changed the switch to CAN, plugged to the middle “CAN” port on the Cube, then did the following:
-Changed CAN_P1_DRIVER from 0 to 1. Wrote Params
-Unplugged and plugged Cube with USB cable
-Changed GPS_TYPE from 1 to 9
-Changed NTF_LED_TYPES from 199 to 231. Wrote Params
I have “NO GPS” and if I go to UAVCAN and click SLCan Mode CAN1 nothing happens. The leds on Here2 are blinking (cyant) blue
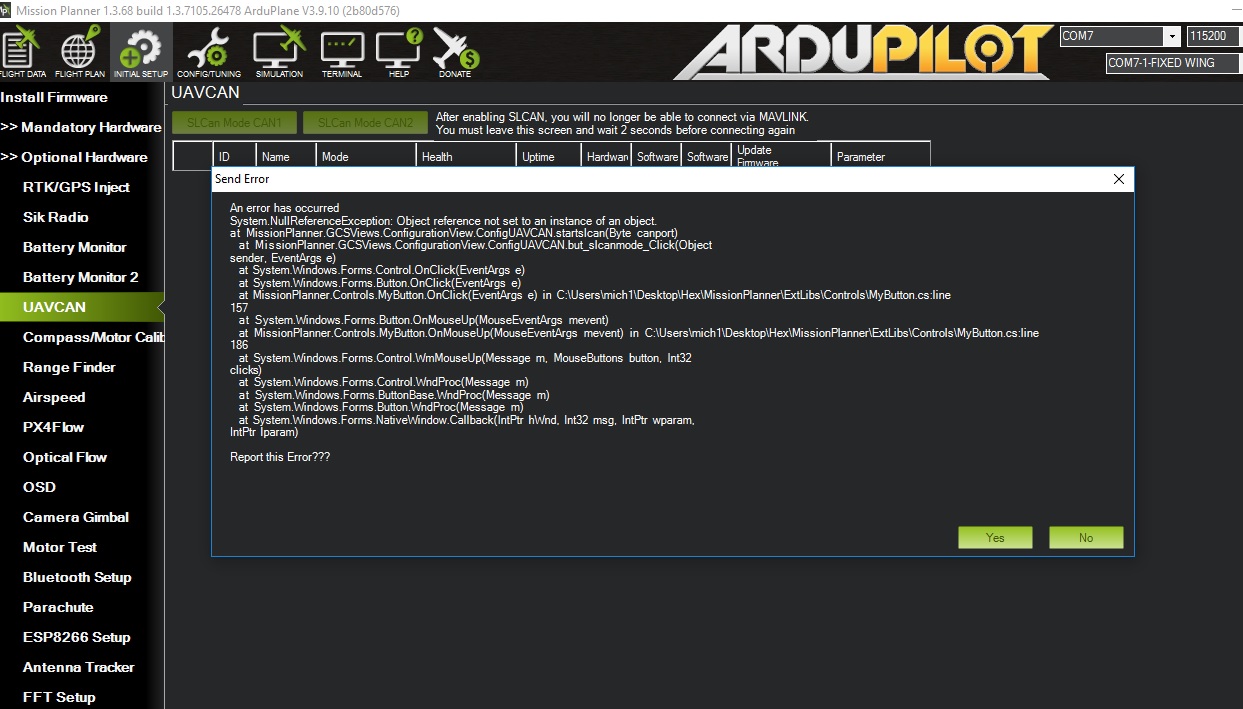
I tried same procedure with another PC and when clicking on SLCan Mode CAN1 appears the following message:
Is Copter 3.7 firmware the only one option to do this? Plane 3.9.10 does not work?
Thanks
NOTE: Going back to I2C mode works ok, with GPS 3D Fix
Hi!
I am trying to get my first connection. Think it is time for some help. The Here2 is delivered as set to CAN.
But first, I wanna try that version you did update to (now click on Michael_Oborne up to the right to see his post), Can’t find it. The newest I found is the 15 june.
My current state: Here2: the nice blue directional fadings at start up, then solid green. Then blue fading and back to solid green after start up sound.
I did one mistake when I did follow this https://docs.cubepilot.org/user-guides/here-2/updating-here-2-firmware
At that time I had not read this: https://docs.cubepilot.org/user-guides/here-2/here-2-can-mode-instruction
The mistake was updating on MP 1.3.68, not MP 1.3.63. Right or wrong depends on which guide.
I was able to see it in SLcan. So I procced. After updating Here2 boatloader, it was the first time I did see the green lights. After application installation they was back to green.
ID is 125, not changed to 20 due I had not seen this guide at that moment:
https://docs.cubepilot.org/user-guides/here-2/here-2-can-mode-instruction
After that I can’t connect to Here2 in SLCan.
What version that was uploaded through is unknown. But I have the files.
Everything to check I found is checked.
Problem list:
Parameter “uavcan.node_id” Can’t be found.
“No GPS”
Can’t enable any compass anymore. Calibration of compass can’t be started.
Before all compasses disapered, I had intermittent EKF 2 YAW error. (Different degrees all the time).
Have heard a lot “bad compass health”.
COMPASS_TYPEMASK: 63487 = “bad compass health”. 0/3 compasses found.
COMPASS_TYPEMASK: 6137 = 2/3 compasses found. No UAVCAN. Is this code better that day it is working?
NTF_LED_TYPES = 231
NTF_LED_TYPES = 39
Both is suggested. Which is the right one?
I have the Yellow wire soldered to CAN L1, the white wire soldered to CAN H1. Ground and 5v+ are coming from the old GPS port. This is on the Solos main board with the accessory port ribbon cable removed. Both of my CAN wires are the same length, I’ve done continuity tests that prove my soldering is good. I have continuity at the Here V2 plug end when the cube is installed but lose continuity when the cube is removed so I am confident I don’t have a short. My CAN switch is set to CAN. Latest master and Mission Planner. I’ve tried a few different masters with the same results. I’ve tried a few different Solo black cubes. My params are set correctly. When I click SLCan Mode Can 1 it disconnects Mavlink and nothing happens. I don’t see the Here V2.
Latest master may have issues, try July 16
I have recently purchased a stock of Here2. They all came with can enabled, I successfully updated them following the instructions. I also have an older Here2 rev2 that is not detected in CAN mode. It just sits there with the blue led breathing. I tested multiple cables and two cubes. I correctly enabled the can and all the other settings.
The unit works fine in i2c.
I have spent an hour trying to find the Proper SERIAL3_BAUD setting for Here2 in GPS1 serial3 port. What should it be?
Update to today’s mission planner beta.
115200
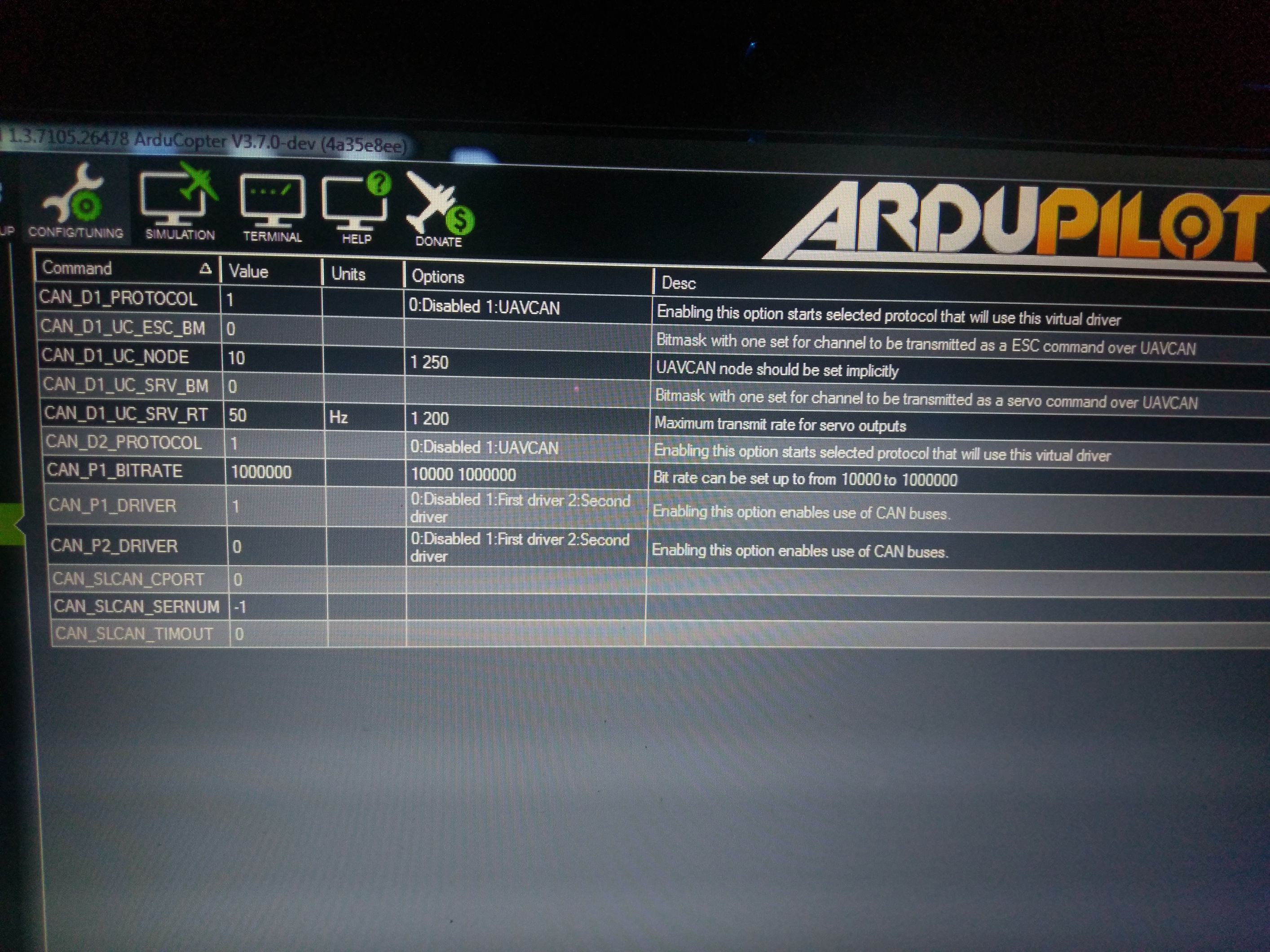
The options in the can_ params are different with the July 16 Masters. I still set the CAN_P1_Driver to 1. I still get the same results. Is this because I have the earlier version of the Here V2, the Here v2 that came with i2c enabled from the factory? Any other thoughts?
What difference are you seeing?
I’m seeing a difference in the params in the full params list. When I search CAN_ after loading master July 16. After loading and setting CAN_P1_Driver to 1. Write, Robooting and back into my params CAN_ I get new parameters that I didn’t have before. Even still, I still have the same error, nothing happens when I click SLCan Mode Can1
I get the same error. My Here V2 doesn’t show up no matter what I do. I have the constant breathing blue lights on my Here V2.
Is there a reason that the here v2 on can does not report hdop like older I2C did.
Because HDOP is not an accurate or even useful measure of gps quality.
So there was no message added for it.