Since I am new here and I am currently building a Hexacopter Drone, I need someone to answer the following questions for me.
1- Which Here 2 GPS setup is more accurate, CAN or I2C?
2- As soon as I got my new Here 2 GPS, I turned the switch to I2C and connected it to my Pixhawk 2.1 through GPS 1 port. I took it outside and noticed on my mission planner window that the drone was moving randomly and it wasn’t stationary. The location was correct but it was moving. Why is that?
3- I didn’t set any parameters on Mission Planner after connecting Here 2 to GPS 1, is that okay? if not, what parameters do I need to set?
I will be looking forward to your answers based on your experiences.
Accuracy is no difference no matter if it’s CAN or Serial. CAN is the way forward because if frees up Valuable UART ports.
As for why the movement remember all GPS has a tolerance. If you were seeing small movement it’s either the normal GPS tolerance or your lock is not good and it’s trying to get accurate position.
Make sure it’s got clear sky and no large buildings around or any metal as the compass can affect the movement too and you can get rotation as it’s trying to get good position data.
There is very little config needed for normal GPS setup other than just connecting and then setting the compass correctly
I am running the latest version of Mission Planner (v1.3.68) and ArduCopter V3.6.11.
1- After setting up the required parameters, the LEDs started to flash yellow but the message ‘’ No GPS" is still displayed on Mission Planner whenever I connect.
2- I am also stuck at step 9 (Step 9: Using the Mission Planner SLCAN interface). Whenever I click on SLCan Mode CAN1, it doesn’t show the Here 2 at all and the button remains greyed out.
You need to change the GPS to use CAN.
I did a video on this on YT, but the prams are
You need to set the
CAN_P1_DRIVER to 1
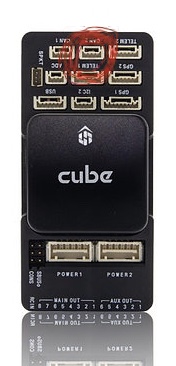
be warned that early carrier boards have the CAN ports labels the wrong way around so for this you need to be in the Middle CAN port on the carrier, may be label CAN2 but it’s the middle port along the bottom.
Next you need to tell Ardu to use CAN for the GPS and to do this set
GPS_TYPE to 9
Finally you need to set the LED settings to use CAN as well as this is
NTF_LED_TYPES enable UAVCAN
Once this is done save prams and reboot, you shoud then get GPS working on CAN, note that when I swing UAVCAN you will not have HDOP reading as it’s no longer used, you should still get GPS showing 3D Lock though.
Also note the “safety” switch Will not work and you will either need to bypass this in the arming checks or use external one.
@MadRC I followed those instructions but still had no GPS… I will try again tomorrow and let you know what happens. @philip Yes, I connected the GPS to the mislabeled CAN 2 port on the Pixhawk… no luck though.
@MadRC@philip, gentlemen, I carefully followed the instructions and still got no GPS. The GPS LED is flashing yellow.
I changed the following parameters according to the Wiki page:
CAN_P1_DRIVER = 1
GPS_TYPE = 9
then I restarted mission planner and rebooted Pixhawk, then I changed the following parameter:
NTF_LED_TYPES = 231
The GPS then started to flash yellow but no GPS is shown on mission planner. I took it outside in the open but nothing happened.
@philip Okay, here’s all I’ve got… If you cannot figure it out off the top of your head then I think I will just use the GPS1 port since I am not particularly picky about which setup to use. Additionally, I want to use my old Here GPS in conjunction with the Here 2 GPS for redundancy by connecting it to GPS2… is that possible? will that improve GPS functionality overall for my drone? (It’s called GPS blending I believe)
I have not updated the firmware. I tried doing this as explained in the Wiki but whenever I click on SLCan Mode CAN1, it doesn’t show the Here 2 at all and the button remains greyed out. So I cannot flash the firmware to the GPS. (It might be the firmware which causing this…)
Yes, I took it outside and moved away from building as much as I could and still had “No GPS”.