For GPS fix go outdoors as @philip suggested earlier.
2 Likes
@philip i am using latest mission planner 1.3.66 and arducopter 3.6.8.
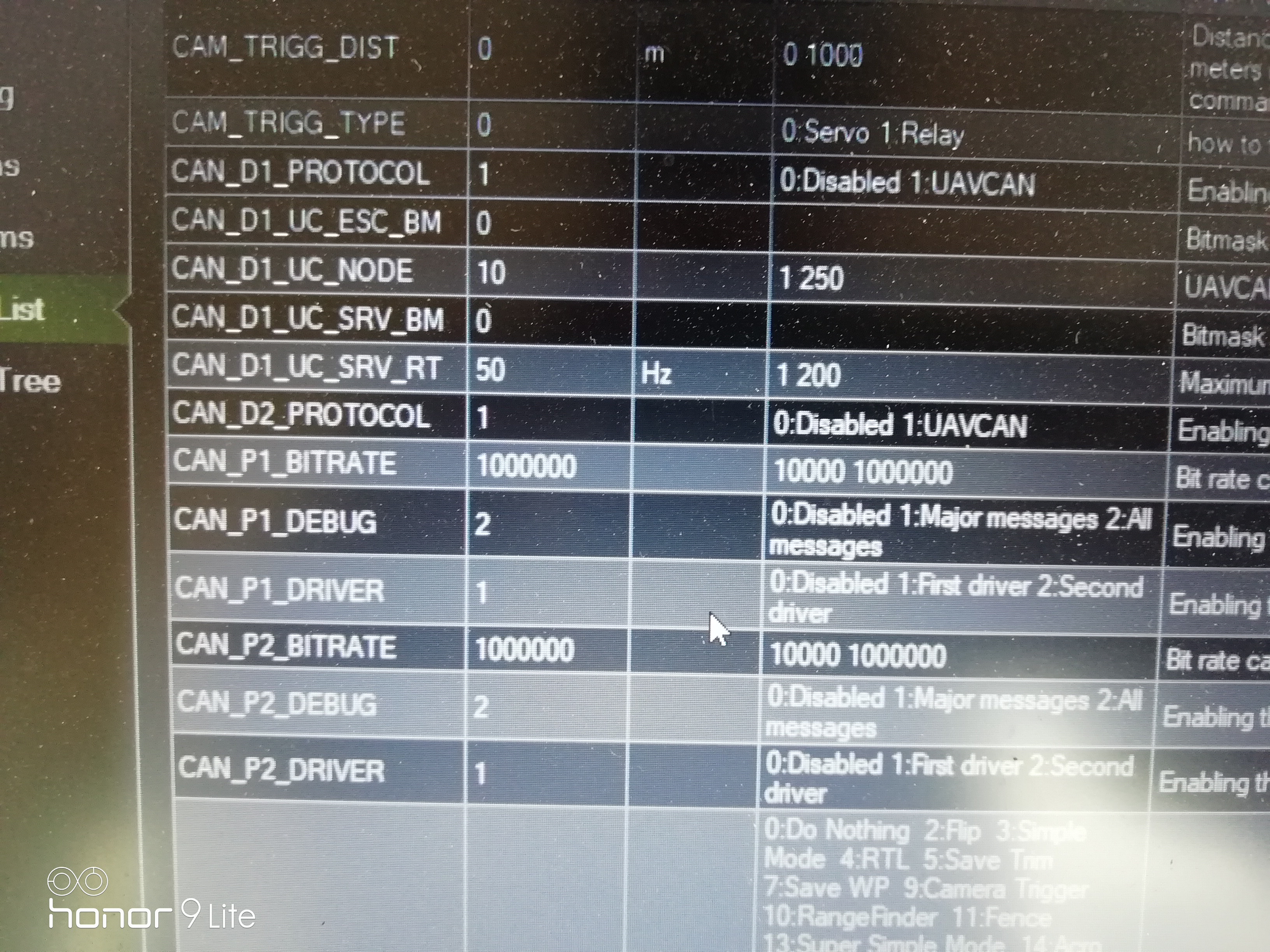
i was trying to connect here 2 GPS via can protocol for that i have switched here 2 from i2c to can and followed your steps.
but mission planner couldn’t detect the GPS and no GPS lock also.and here 2 led always cyan blue light blinking (both green and blue partially) .
So you upgraded it’s firmware?
I don’t think… I connected to can 2 labeled in carrier board.
GPS_type I set it to 9 but after reboot the cube it’s again default value as 1.
Please read the full thread here. So you get the full instructions
If you have blue breathing lights, yo need to update the firmware.
It’s yellow light flashing
How are you setting the parameters?
I’m concerned that you have set this and the INS_USE3, and both are resetting
which means ?

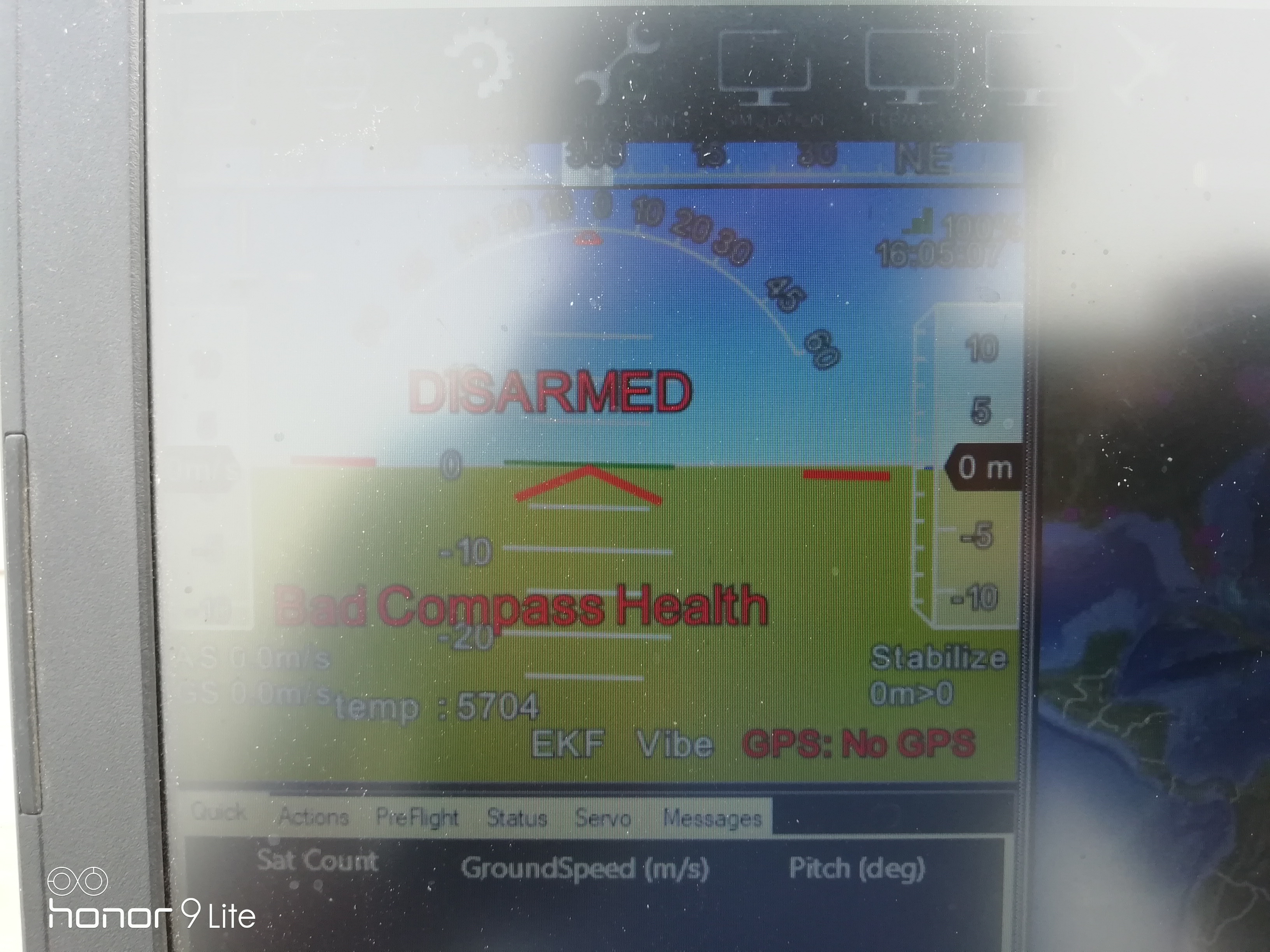
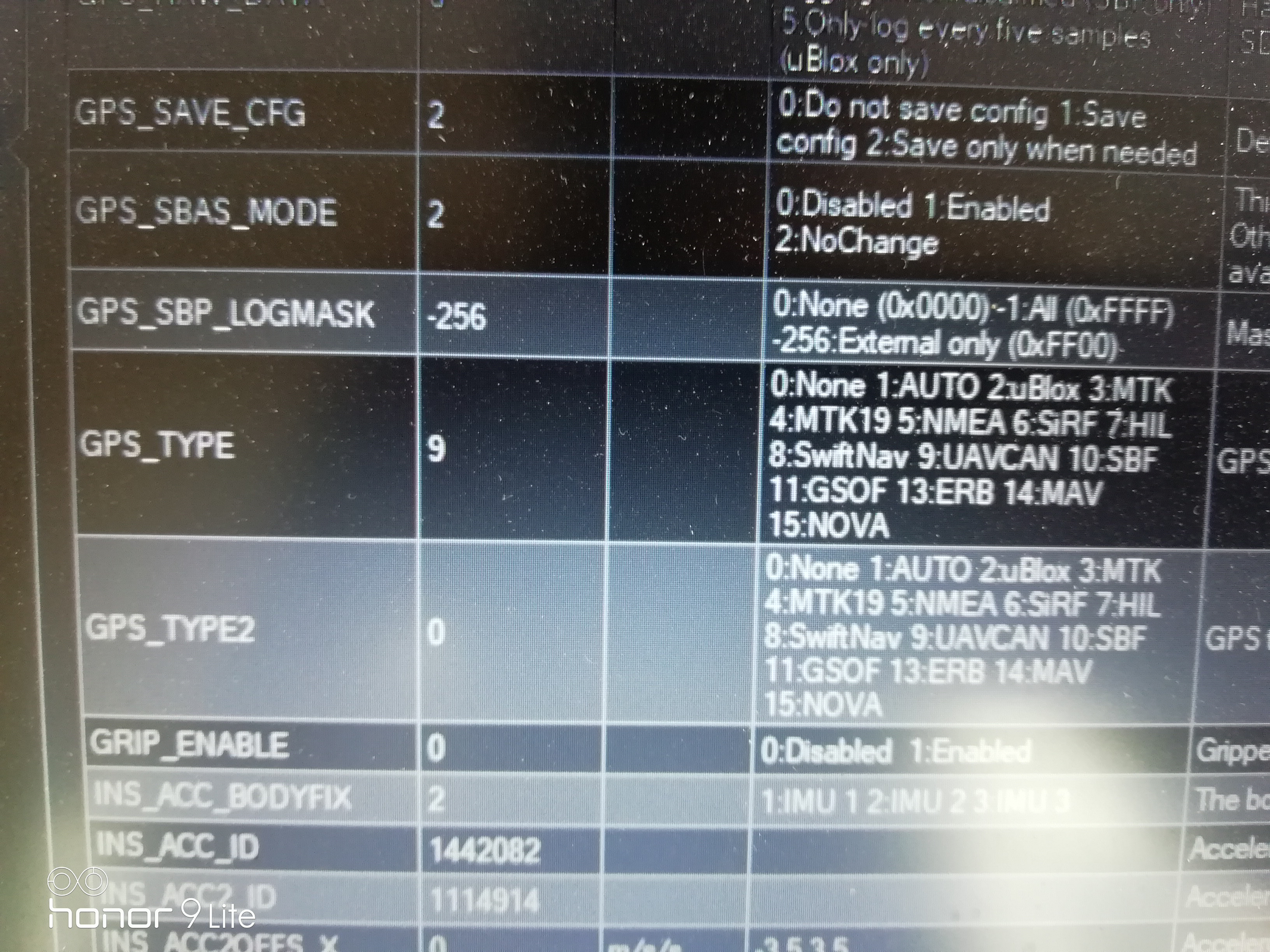


CAN GPS TYPE SET TO 9 and CAN PROTOCOL SET ALL PERFECT but no GPS fix. Led startup correctly and flashing yellow light and I was outdoor only.
Please post a full log
@philip here is the log
Did you set your node ID using master before reinstalling 3.6.8?
Yes I set it node ID as 10 and then only installed 3.6.8 firmware
Please just drop the bin directly in here…
00000002.BIN (322.7 KB)
Stable versions of arducopter currently do not provide UAVCAN dynamic node id allocation. You can try setting a static node id on the GPS (any number between 1 and 125 that doesn’t conflict with another node - so not 10). This is done by setting the parameter uavcan.node_id on the GPS.
1 Like
so as of my configuration on GPS node id 10 will not work?