You just need different node ids for the GPS and cube, e.g.:
Cube: node id 10 (set using the CAN_D1_UC_NODE parameter on the Cube)
GPS: node id 11 (set using the uavcan.node_id parameter on the GPS - I believe there is a way to do this via mission planner)
Again I reinstalled 3.7.dev master arducopter with same setting on the cube. After installed I got GPS working via can protocol well without any parameters changed. I didn’t change any node ID too.
But where as again I tried with AC 3.6.8 but it didn’t work. I changed node ID for gps is 11.


@jschall thank you now working GPS through CAN .now i installed arducopter 3.6.8
1 Like
I have a pixhawk 2.1 cube, I have read almost the entire forum and I have not been able to solve my problem, install copter 3.7 and I have the latest version of the mission planner.
I had no problem to update to version 3.7, I connect without problem to the pixhawk
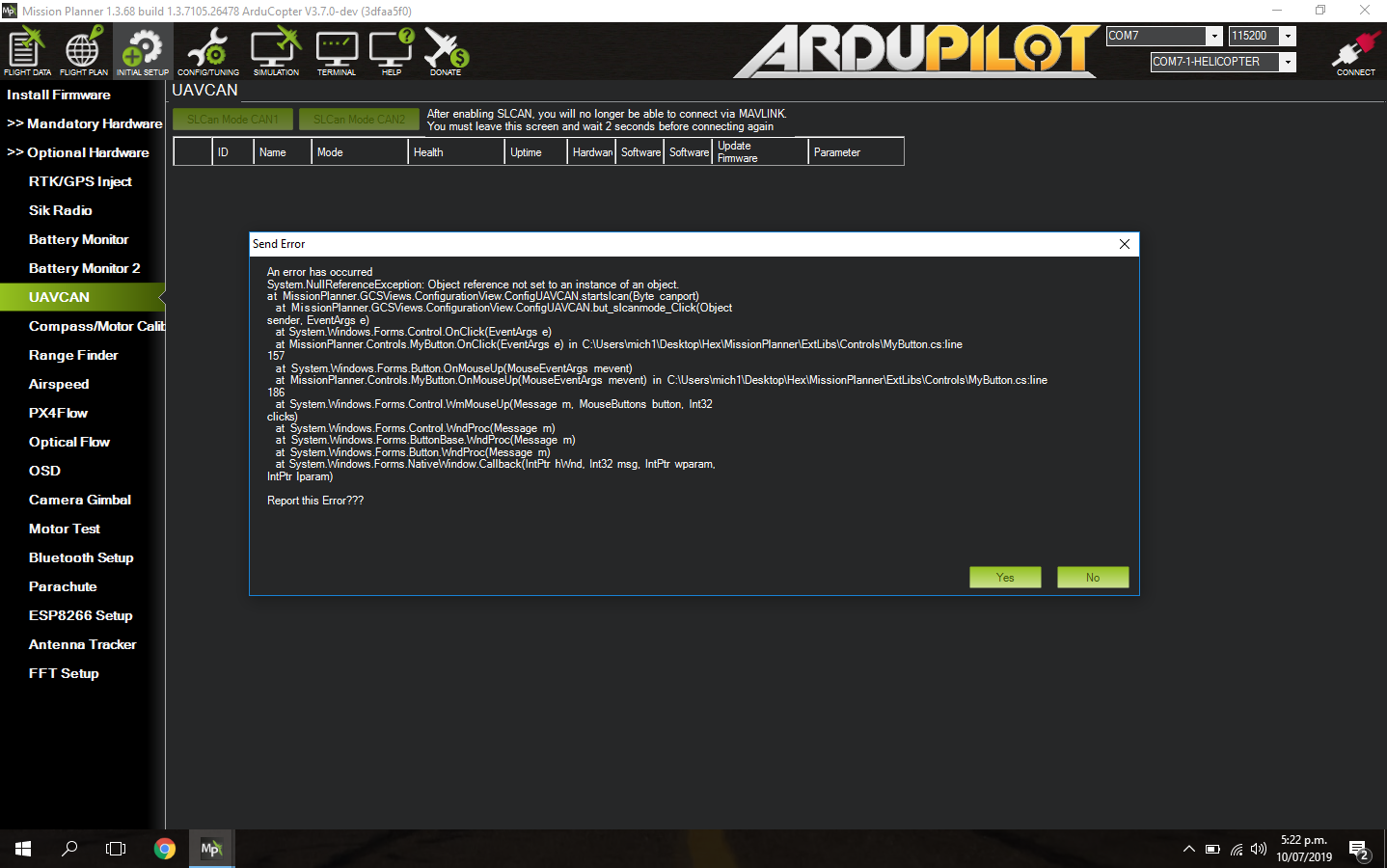
but when I click SLCan MODE Can1 I get the error that I show in the following capture
my intention is to use ardurover 3.5.1, for this version that form of connection is the most recommended, I can confirm the canbus and then go to the version ardurover 3.5.1
or it is better that I use the 8-wire gps cable, although I also tried to use it but it did not work
the switch inside the gps is in can mode.
Are you sure you have “CubeBlack” firmware not FMUV3?
yes, completely, I have installed the copter 3.7 cube black firmware several times. I’ve also tried feeding the pixhawk for usb and the power module, but I still can not get the gps to work
I have more than 3 days of trying to make the gps of my cube work, but I have not succeeded, I tried everything.
I have installed the version of MP 1.3.64, I have installed the version copter 3.7 cube black, but it does not detect the gps.
I have tried in diffrent 3 pc , also I have tried with the last version of the MP, I have tested with different compilations of copter 3.7, but nothing works for me.
I have verified that the value of FRAME_CLASS is different from 0.
when I use the latest version of the mp nothing happens, but when I use the 1.3.64 version of mp I get the following screenshot.
I have not managed to work with the i2c protocol and the 8-wire cable.
I am always careful to change the internal position switch when I change the cable. I always use the cube black versions.
I tried with the power module installed or only powered the cube by usb.
when I turn on the pixhawk the led of the gps light only at the firts seconds and then they do not light anymore, it does not matter if I connect it by canbus 4 wires or by i2c 8 wires the only difference is that when I connect it by the 8-wire cable it also turns on the red led of the switch but only in te first seconds.
Will my unit have a hardware problem?
I hope someone can help me.
Thank you
This is exactly the point that I am at. Same situations to a tee. Have you managed to fix yet?
Unfortunately, I have to change the GPS, apparently the problem was hardware. gtfpv made a refund without problem.
Hy Its about two weeks I am stuck with my here+ rtk . Actually I want to use external Barometer on my pixhawk2.4.8 .My problem is when I change the hardware switch to CAN mode my external compass is unable to detect,even no sign of barometer. I also saw whenever I cange the hardware switch to from I2C to CAN mode a bluish low rate blink starts. I am using new firmware 4.0.3
Can you post some pictures and video? It’s hard to understand what you are actually doing.
We have not released a CAN firmware for Here+…