Hi,
I am building a waterproof drone and I need to use an external barometer.
I have the here2 GPS and I don’t understand how I can use the barometer in it.
I will appreciate any help.
what about Copter 3.6.9 and Plane 3.9.8 ?
Thank you for the answer.
I am now able to use the GPS through uavcan and i can see also the magnometer.
but I don’t know where i can read the barometer and use it as my primary baro…
Now at 3.9.11 on arduplane. Is there a way to get baro to work with CAN on this yet?
Use 4.0, yes, just enabled can Barometer
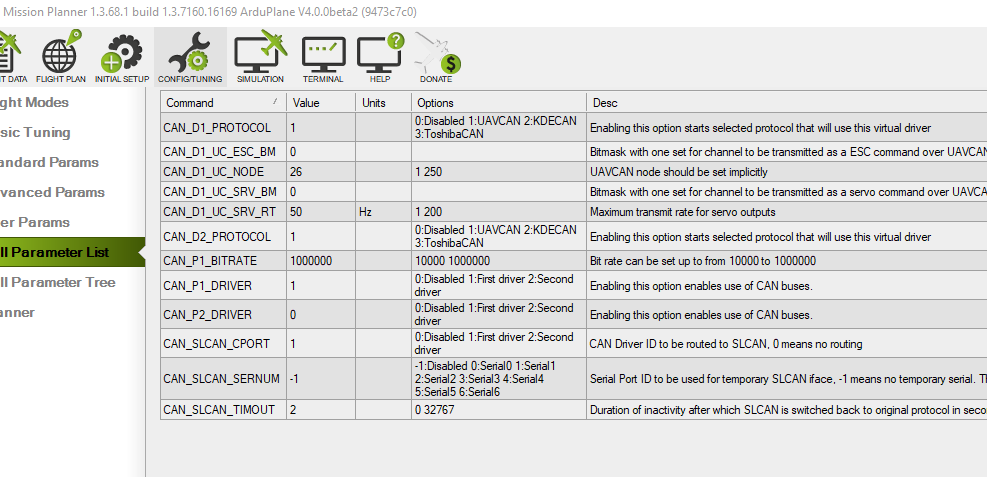
Okay, I loaded Arduplane 4.0.0beta2, Can setup below, good compass and gps, but I don’t see parameters to select the baro, nor do I see response in the hud.
Look under Barometer, not CAN
Can you put up a guide concerning this? Or tell me what params to set? The documentation is all written toward i2c busses and sensors, so it seems unless you already know what to do, or how to read the code, then you’re stuck. Your CAN guide was good, got me right where I need to be, just take it one more step please.
I see no “Barometer” parameters in 4.0, so I assume you meand the GND parameters right? is there a specific GND_Probe_Ext value to set?
I’ll have a look at this later and put something up
you got the baro working? that would be sweet.
Set GND_PROBE_EXT value to 4.
Then, I could able to see values on GND_ABS_PRESS3 parameter, which means the 3rd barometer (external) is working using CAN.
However, there are no way to report the 3rd barometer in real-time to the ground station (Mission Planner). In Flight Data screen, i.e. press_abs and press_abs2 only (no press_abs3?).
Is observing GND_ABS_PRESS3 the only way to confirm Here 2 barometer is recognized and will be in use if GND_PRIMARY set to ‘2’?
Not seeing the BARO_ENABLE feature on the CAN parameters with a Here3. Any assistance? Thnx
here3 doesn’t have a Baro
Because of water resistance? I really like Baro on Here2.
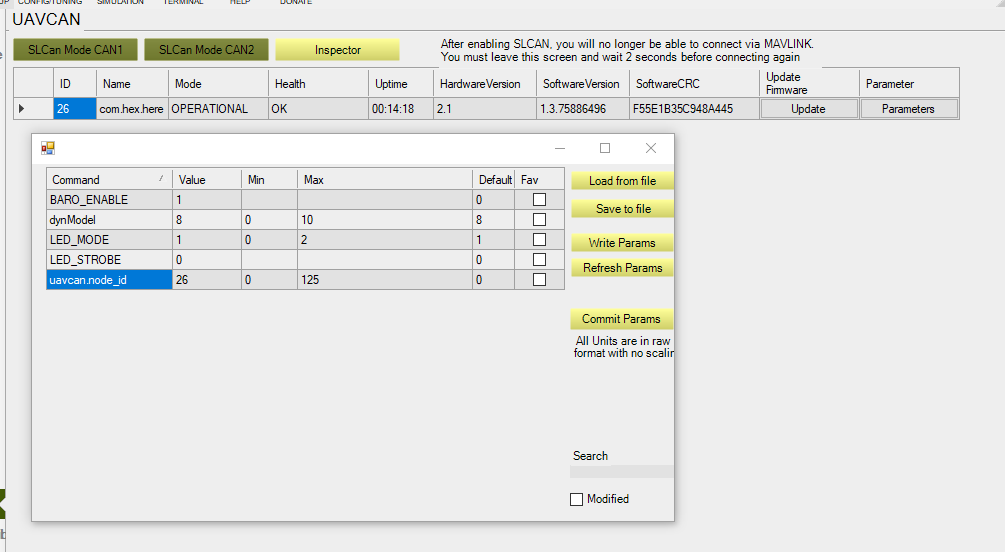
I am trying to enable barometer in HERE 2 GPS. It’s connected to Cube Black. I enabled it in SLcan options and set BARO_PROBE_EXT:4
and still I can’t see the 3rd Baro sensor ???
Are other Here2 components such as GPS and LED working good?
Yes no problem I am using gps and compass as the primary
Have you set BARO_ENABLE in Here2 parameter via SLCAN?
https://docs.cubepilot.org/user-guides/here-2/here-2-can-mode-instruction#allocating-node-id-method