I found a couple more bad GPS units. After updating the bootloader and firmware to the rc3 version posted above, the problem seems to have been fixed. The error message no longer appears, and the performance has improved to be the same as unaffected units. Thanks for the support.
This looks like a different problem. And we need more information to be able to help you solve it.
The bootloader on some newer cubes pulls the I2C bus low during boot. When not connected to USB, this will only last 200ms, which is fine, but when connected to USB, this will be 5000ms, which will cause the Here2 bootloader to time out and boot into CAN mode, likely resulting in the “failing configuration checks” message.
For now, just be aware of this and test without USB connected. I will work on a firmware solution on there Here2 side of things.
I am still having issues configuring the HERE V2.
Setup:
Switch set to I2C
HERE V2 plugged into FTDI converter
UBloc U-Center 19.03
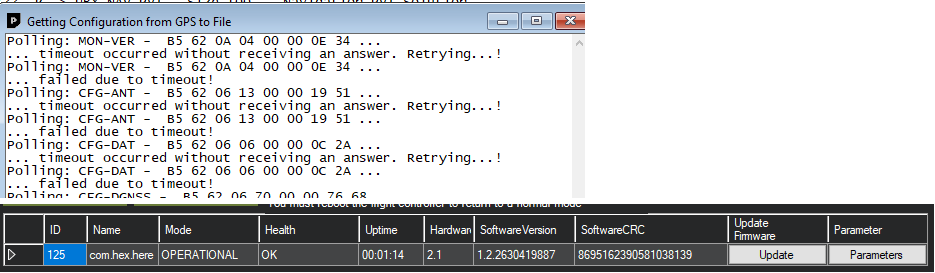
With previous GPS units, I can connect to the M8N via U-Center and change configurations. With the new units (the ones that ship with CAN as default), U-Center cannot retrieve or change configurations. I updated the firmware to the RC3 posted above following the instructions (MP, APM3.7master, etc…), but U-Center still cannot configure. See screenshots below for FW version reported by MP and the U-Center error.
Since I do not currently need CANBUS, I would like to try a previous version of the firmware, such as the one that shipped with the previous HERE V2s (the ones that defaulted to I2C). Where can I find that firmware?
The firmware in the zip file below should address this issue. Note that if you’ve already run the bootloader updater, it does not need to be done again.
This new firmware waits to receive any CAN bus message before initializing the u-blox, so it is essentially guaranteed not to interfere with communication with the u-blox over serial when the switch is in the I2C position.
Is this issue officially solved or still work in progress?
I have been receiving new components from my supplier and been quite unlucky with problem parts (starting with a bad cube that caused the critical service bulletin). The last Here2 unit has this Issue failing config checks.
Not sure I entirely follow the fix procedure. Are we supposed to start at step10 and ignore the rest because I dont see any UAVCAN items in the list. surely that’s because I haven’t followed the previous steps setting it to CAN?
After flashing with Arducopter master its hard to connect with USB without getting ‘unknown error’ when getting parameters. (something about not enough memory).
I believe mine is on the latest firmware (how to check please?). I am using it on the GPS connector, not on CAN. (It came from supplier configured for can,(cable and switch). I could not get it to update following the instructions. The Here did not appear on the list so could not select update.
Is it possible to update via the U-center?
Apart from the nagging warning it appears to be working ok. Is it safe to fly?
All are affected if you insist on using serial. Use can, or update
Nothing to do with u-center… this is the here that needs updating.
You must update in CAN mode
OK followed Here2 update the step by step. Successfully update the bootloader but now cannot connect again with SLcan mode to update the application. Restarted everything many times. Wiped and re-installed 3.7 firmware. Just stuck at this point now.
Reason to update was to remove ‘config checks’ warning.
Once its working I dont really mind if I connect via CAN or serial. Whats the recommendations/advantages?
Anyway some help appreciated. Days have been wasted trying to get everything up to a working system.
Thanks.
I know this must be covered somewhere else but I am not able to find it. Due to the new Here 2 units being shipped default using CAN I assume this is the recommended mode to use over I2C. What are the main benefits of using CAN over the old protocol? I am having the issue with the I2C but maybe it’s best to get the CAN working instead of the I2C if its the preferred way to go.
Hello, today I received my new pixhawk 2.1 cube black, but I could not operate the gps, the canbus mode is only compatible with the latest versions of arduplane or arducopter or it also works with the latest version of ardurover 3.5.1, my intention is to use it in a boat
Basically I2C is very susceptible to external interference, and cannot be trusted to the level a system like CAN enables.
CAN has both hardware and software protection from bad data.