Hi, i am trying 3 brand new kore and cube (i have 3 kore and 3 cube boards) , i read -4,9A, -4,2A and -3,5A while 0 amps (nothing connected) for each kore board, i tried switching the cubes. I use parameters given in below;
@doug, did u find solution to this problem? @Julien, i am also facing the same problem. While using Kore Carrier Board (Cube 2.1) with configuration parameters as mentioned in the spec sheet, the current reading is -ve (3.5A, 3.7A, …) on the Mission Planner screen. i have checked the connections and could not find any obvious issue. Can u plz help/guide in this regard…
Thankyou
@Julien, I did not connect usb. Infact i have been using RFD900x for the telemetry data. I am plugging in the power through battery to Kore Carrier Board and the sign of current is negative in MP.
Regards
Yasir Khizar
@Julien, yes i have confirmed that the parameters are correct. I have checked them twice. However, i did not carry out any voltage or current calibration. In addition, i am using 22000 mAH LIPO Battery. The quad copter is still on the ground with motors connected. I think the current drawn from battery should be in milliamps compared to negative current.
I tried 3 different kore boards and 3 different cubes (with usb, with telemetry and battery), voltage reading is ok but current reading is negative, When i change batt_amp_offset i can make it 0A when it is 0, then a little tuninh with batt_amp_pervolt i can read suitable values for current but i think this is not a solution.
Right now i will use an old cube and kore (i have mounted on my drones) then find whether the problem is on cube or kore.
@sierra_spektreworks, @philip, @Julien, can u plz guide/help in regards to negative current reading problem via kore carrier board on mission planner…
Regards
Yasir Khizar
The 200A Hall Effect sensor needs to be calibrated at 0A to get correct readings. The parameters in documentation are based on an average from the sensor’s manufacturer, which is “good enough” for casual use. But if you’d like to calibrate it to get more accurate readings about the zero point, follow these instructions. This calibration should only ever need to be done once per board:
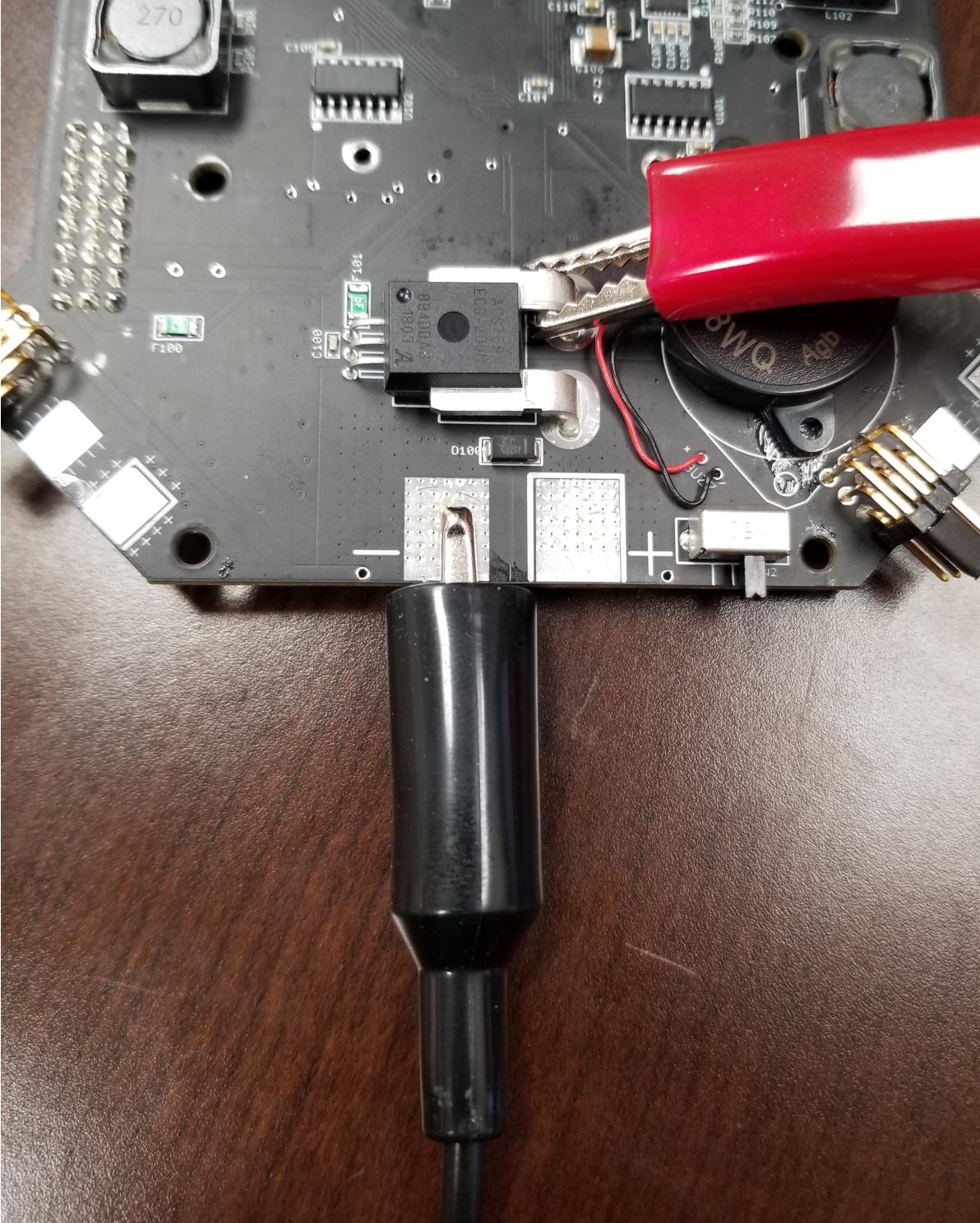
Using a bench-top power supply or a battery, use alligator clips to connect the positive wire to the in-board bus bar of the current sensor. This will energize the entire board, but bypass current through the current sensor. This way, you can get a true 0A reading.
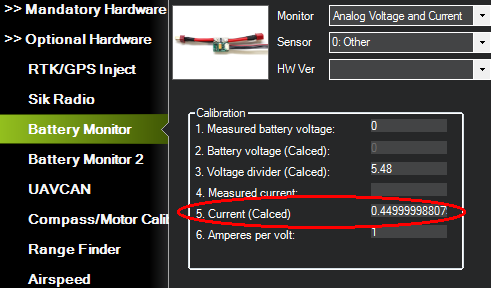
Power up the board in this configuration and connect to Mission Planner. Set the following parameters to these temporary values:
BATT_AMP_OFFSET = 0
BATT_AMP_PERVOLT = 1
Doing this will cause Mission Planner to report the direct analog voltage it is reading from the current sensor.
Go to Initial Setup → Optional Hardware → Battery Monitor. In the calibration box, read the value for “Current (Calced)”. That is your offset voltage at 0A.
Set the offset parameter to the value you read in #3:
BATT_AMP_OFFSET = [value]
BATT_AMP_PERVOLT = 50
Power down and reattach the positive cable to the main solder pad. Your current offset voltage should now be calibrated.
Calibrating the 0A offset removes most of the error from the current readings. If you require the full accuracy that the current sensor offers, you will also need to calibrate the BATT_AMP_PERVOLT parameter. I don’t recommend doing this unless you are familiar with high-power electronics. For most users, a value of 50 is good enough.
You will need an accurate external load of some kind, such as a programmable artificial load or precision power resistors. Attach the load to the ESC power pads and back-calculate the multiplier based on the equation of a line. Set the OFFSET and PERVOLT parameters to 0 and 1 (same as step #2 in previous post) so you can read the direct analog voltage in Mission Planner.
Representing the equation of a line as y = mx+b:
y = the current in Amps (this should be known based on your external load)
m = BATT_AMP_PERVOLT
x = analog voltage from sensor
b = BATT_AMP_OFFSET
You can solve for m, as you will know all of the other values. I recommend you choose at least 2 current values and take the average result.
Thank you @doug for posting the batt_amp_offset and batt_amp_pervolt. I have been coming back to this page for years to get these offsets. Would be nice if it was updated in the software!
I have this same problem as Doug reported at the beginning of the post. However, I did get the current to read read 0 to 0.4 amps in the positive direction. I did this by setting the:
BATT_AMP_OFFSET = 0
BATT_AMP_PERVOLT = 1
I think I have a rev A bored, mine has a sticker with a QR code.
I still get the Battery 1 unhealthy error (
I am running ArduCopter 4.5.5 on a cube orange Plus