I am attempting to use two Here3+ GPS in a daisy chain series, in order to use less CAN ports on the flight controller.
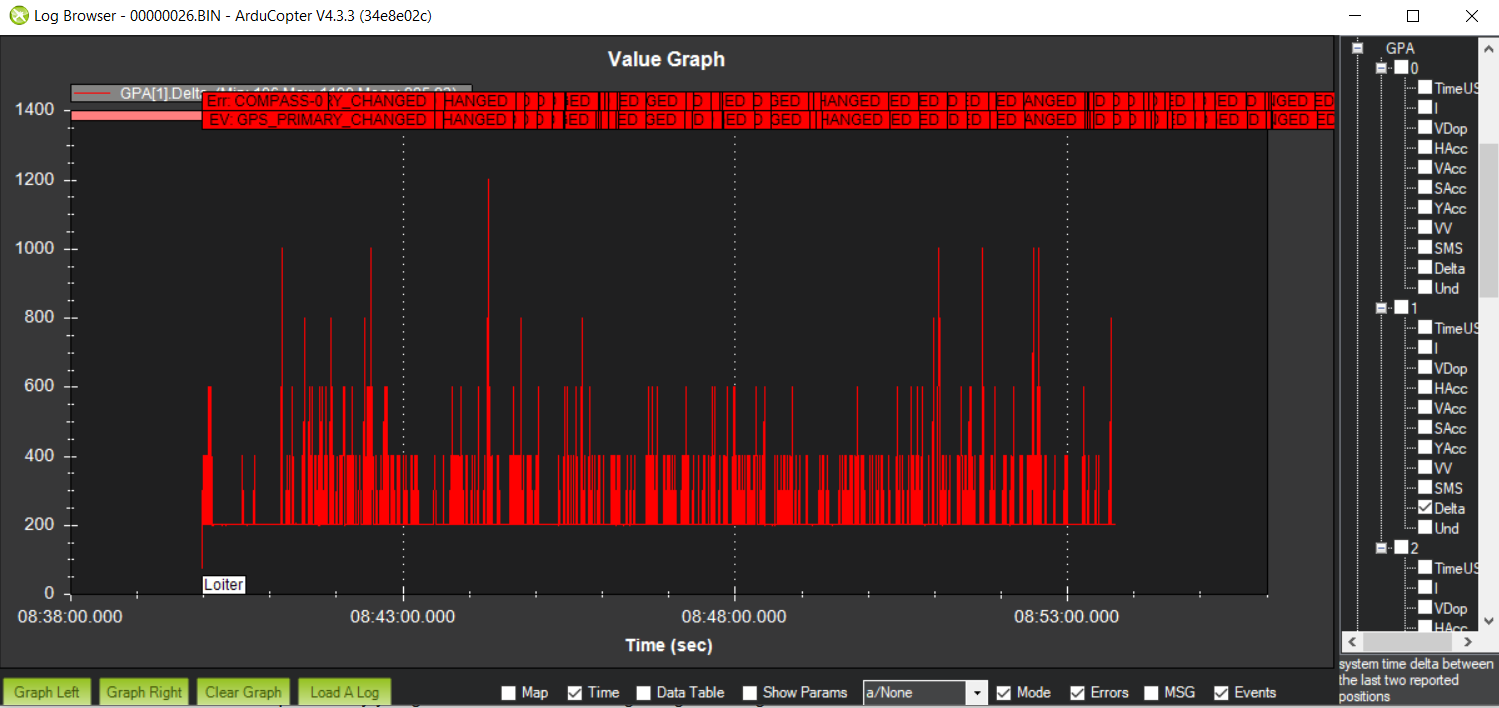
Both GPS units are able to connect, get unit node ID’s, and find satellites, but I receive a GPS unhealthy warning on the GPS at the end of the daisy chain. I have tried using terminating resistors, and going without them, but I still get the same issue. The GPA delta graph shows that the GPS is frequently communicating too slowly, but I am not sure why.
The issue goes away when I connect GPS1 to CAN1 and GPS2 to CAN2. I believe this issue was also reported in this thread, but there was no info whether the GPS units were in series or not:
https://discuss.cubepilot.org/t/two-gps-here-3-issue/11116
Is there an issue setting up two Here3+ units in series?
As an additional note, the GPS units are not using the second CAN line since Dualcan is not supported yet. Instead, both GPS units plug into adapter boards, which allow for series daisy-chain connection.
How can I solve this CAN traffic issue to have them both operate smoothly on one CAN line?