Hello,
We got some issue with our HERE2 devices. We start by getting the prearm issue :
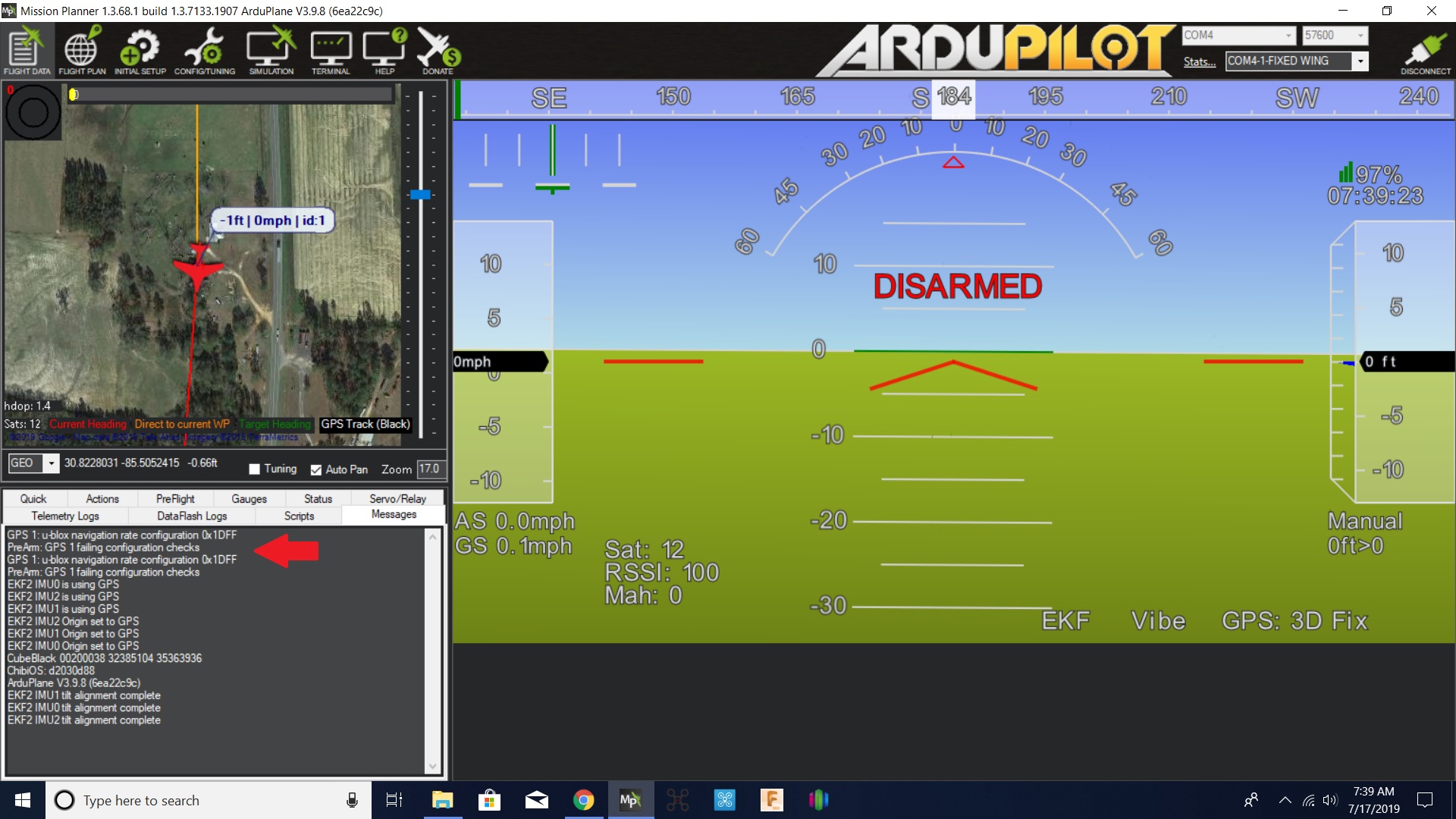
GPS 1: u-blox navigation rate configuration 0x1DFF
PreArm: GPS 1 failing configuration checks
To solve this,
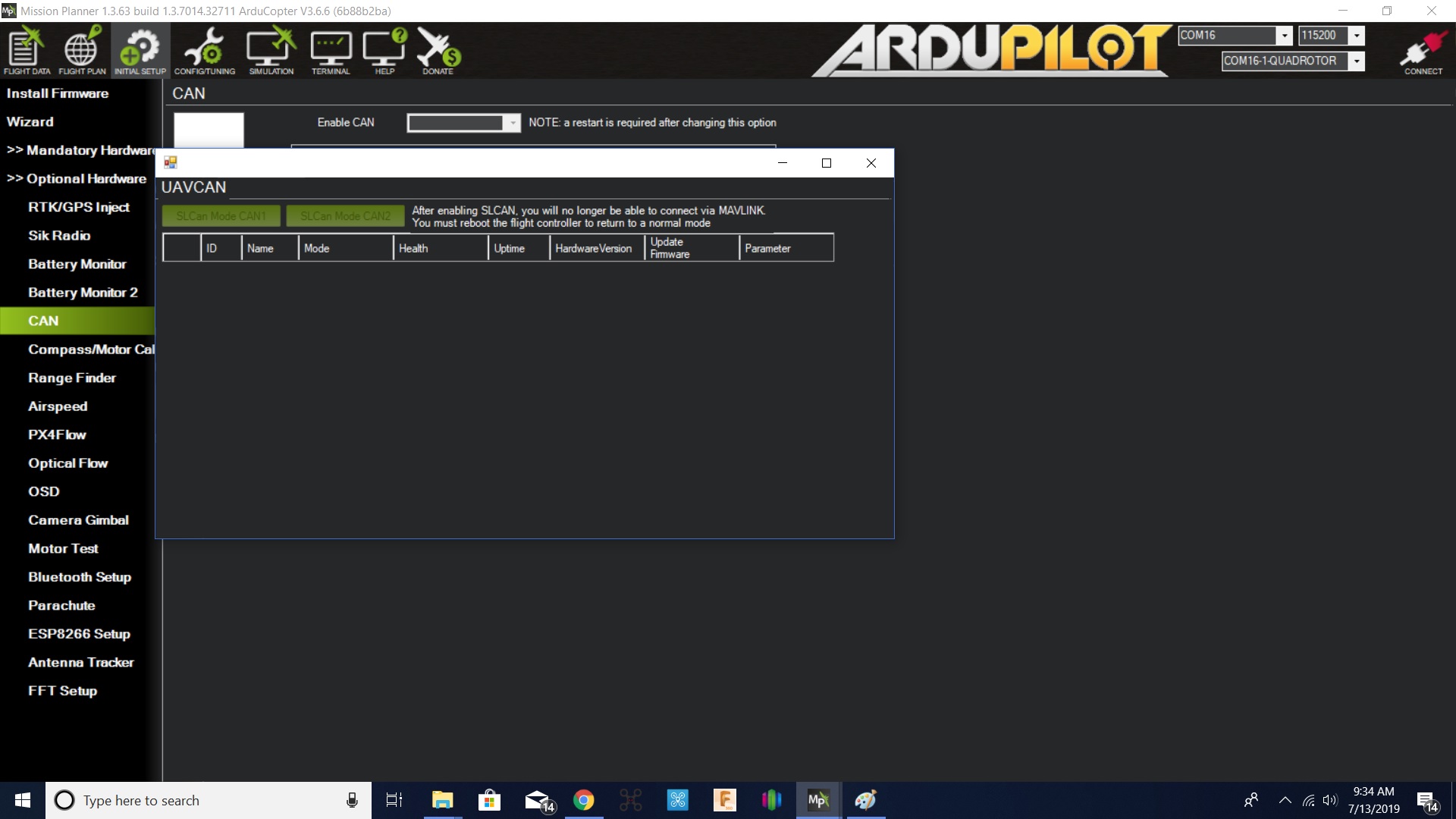
We followed the procedure in HERE2 GPS failing configuration checks . We tried to configure the gps to can. It was not detected by the pixhawk (we tried several gps, several pixhawk, several carrier boards, and by applying the proposed parameters, then a little all the possible parameters, can, node id,…), without success…
Then we checked the boards’ uavcan by connecting a Zubax (no problem, it works very well : Uavcan ->pixhawk ok), then we used the usb can converter (BABEL) to see if here 2 is present on the bus (nothing on the can) → Here 2 does not manage the can with its current firmware.
The proposed method is to flash by CAN, having the firmware and bootloader, we looked for another method to flash (via jtag and st-link → stm32f3), we found the pinout of the jtag (similar to that of the carrier board - CubePilot method - SM06B-SHLS-TF 6 pin connector), we flashed the bootloader (address 0x800000000) but not having the address at which the firmware starts, we preferred not to flash anything else). We tested on carrier board then on drone, the gps configuration problem is solved, no more problem reconfiguring the ublox here, we can arm… but!
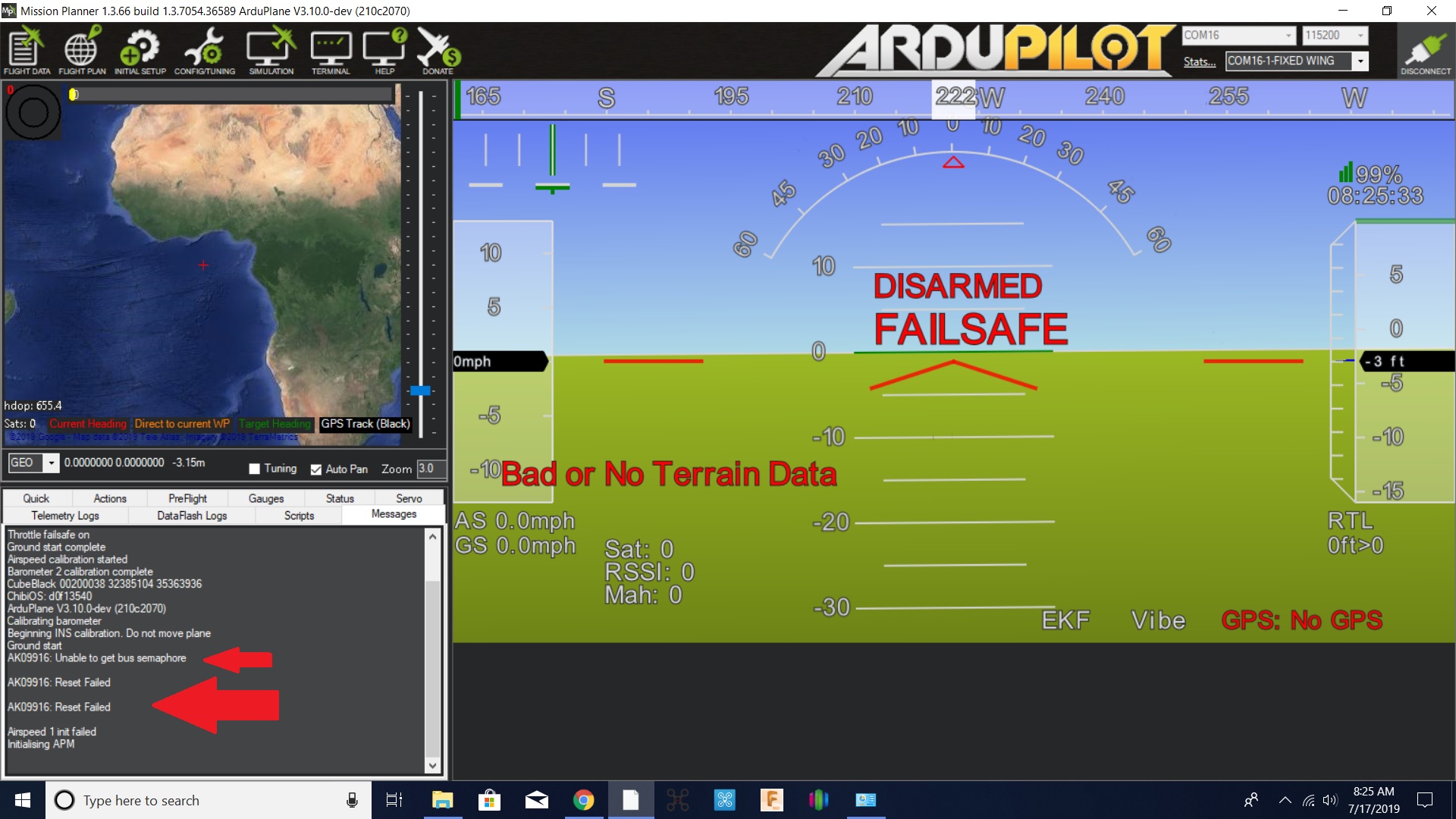
The new problem is that the compass of here is no longer recognized… it is necessary to update also the rc3 firmware…
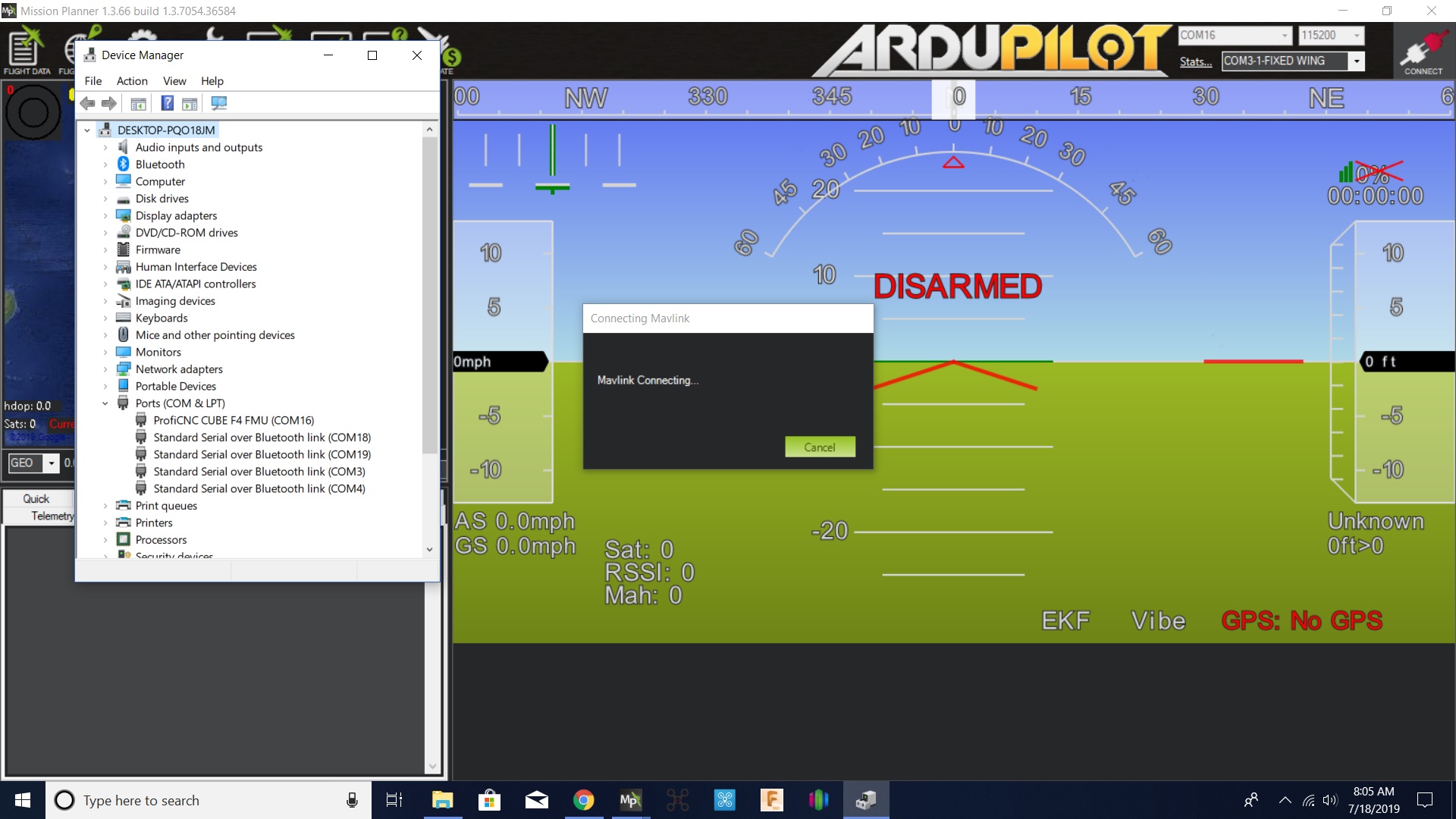
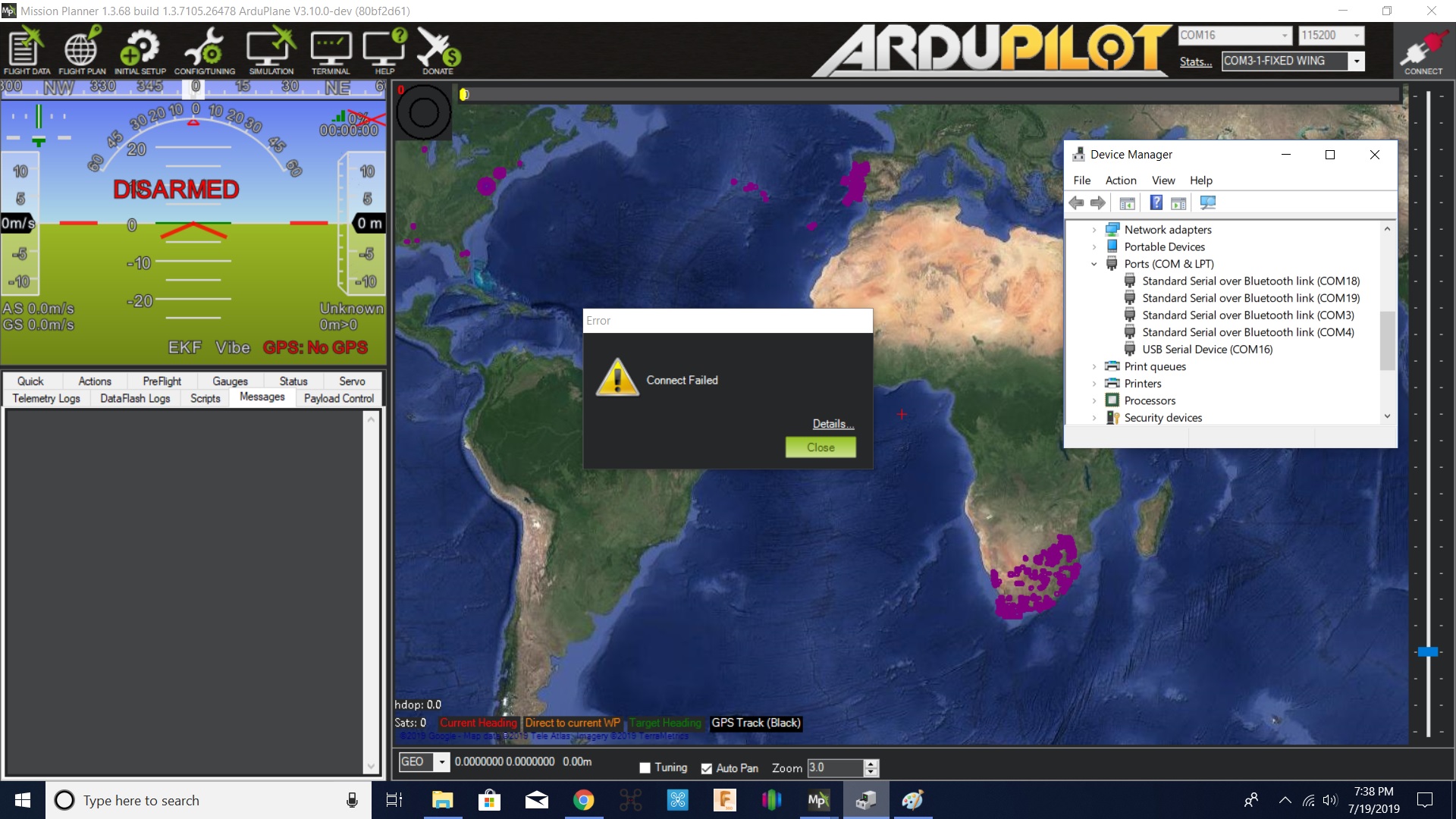
Impossible to use our here 2 in can, it is neither recognized under mission planner, nor under babel (with uavcan gui tool)) we tried again to flash through the can (with the bootloader updated in case or) unsuccessfully, we tried to find the address where the firmware should boot, or an alternative solution, without success.
We can we do ?