The base is a nearly identical GPS. You set the base at known position and it provides an accurate correction to your rover. You can acquire a known position anywhere using several methods.
we have tested with a USB OTG micro cable direct connection to Herelink, no it does not work presently. Currently another system, example laptop, and a radio are needed.
Has anyone had success setting up the Emlid Reach RTK system with the Herelink? Assuming it is configured the same way as the Here+ method stated above via the external GCS and wifi
Saw the teaser photo of MP on Herelink, when that is rolled out do you think that will support the Reach hardware, guess it only will when the built in wireless feature you talked about above is implemented? Any time frame on that? Thanks for the help Phillip really appreciate it.
Hi Philip, I have the herelink, pixhawk 2.1 cube, and the here+ RTK. I have a laptop with a 5.8g usb wifi. I also have a telemetry radio. I can connect the herelink to the laptop via wifi (laptop running mission planner). In mission planner I can connect the here+ RTK, and the telemetry radio. The herelink doesn’t see the here+ RTK. If I use the herelink to fly waypoints, will my accuracy be standard GPS or RTK? Do I need the telemetry radio or does the herelink transmit the telemetry to the laptop via 5.8g wifi?
Thanks in advance.
When connected, the Herelink RTK indicator is still greyed out, showing duration and satellites as blank. Should it be connected and showing that data?
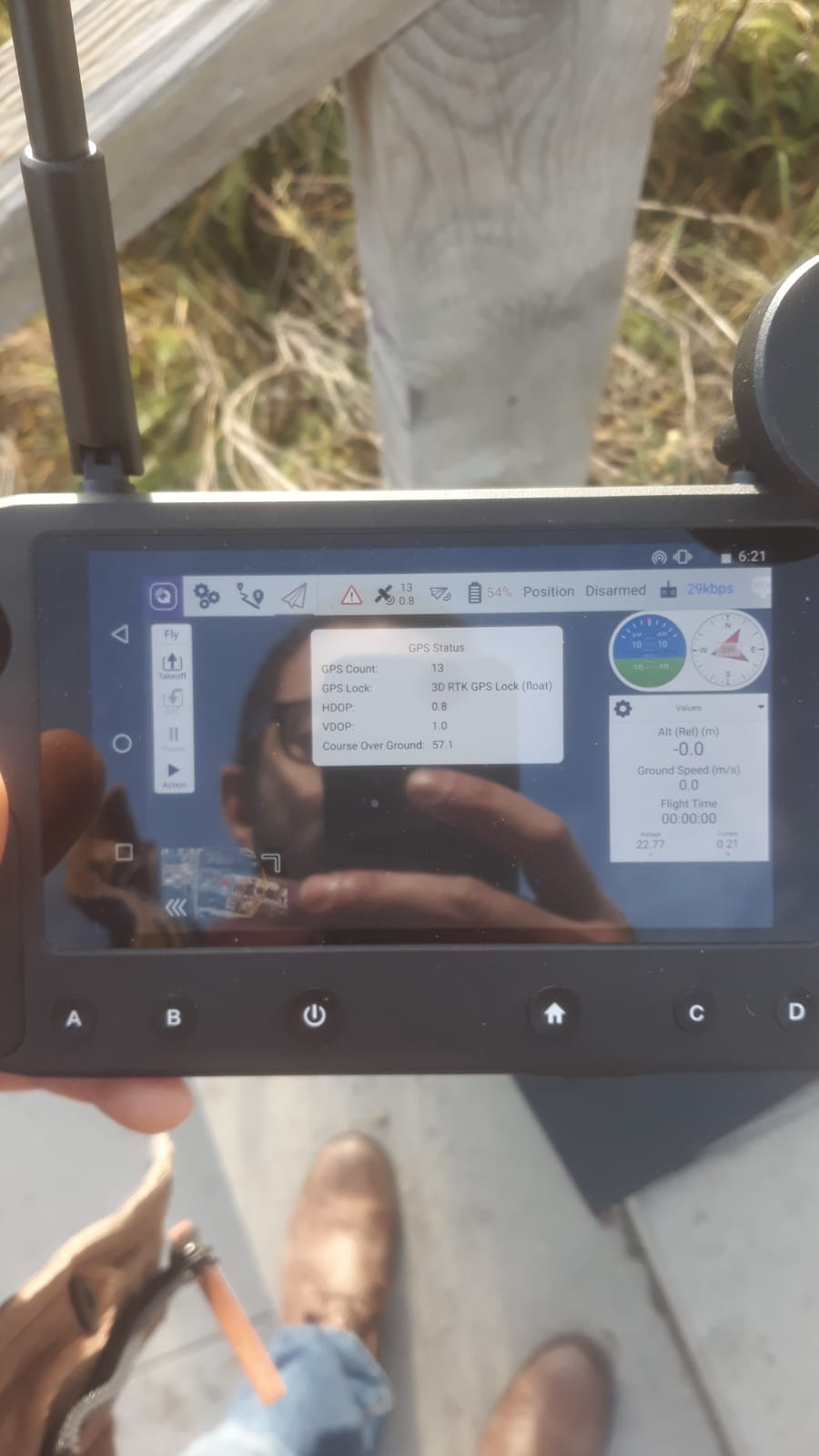
I tried today with Here+ base station connected to a laptoop. My laptoop connected through wifi to Herelink. After waiting around 10 min I got my 3D RTK GPS Lock.
I did not fly with it, just wanted to try it. I am using PX4 not ardupilot. I do not know the problem from